I came across a broken 3 dB attenuator and since I was curious of its internal design, I decided to do an autopsy, just like I did with the broken termination a few months ago. The attenuator is made by Mini-Circuits and it is a low-cost type useful up to 6 GHz. The manufacturer part number is VAT-3+. The data sheet says it costs $13.95.
VAT-3+ attenuator
The symptoms were that the female connector was an open circuit (bad) while the male connector had a resistance of 150 ohms to ground (which is what it should be for a 3 dB attenuator). This indicated an open circuit between the female connector and the internal resistive network.
It is perhaps not obvious how to take the attenuator apart, but I decided to start filing on the central tube (which seemed to be made out of brass) in the hope that I would then be able to pry it apart to reveal the interior.
An opening has been filed into the enclosure and the innards can be glimpsed.
This turned out to be successful and I could soon remove the tube. An alternative (maybe easier?) method might have been to remove the label and then drill out the four punch marks around the rims of the tube.
The tube has been removed.
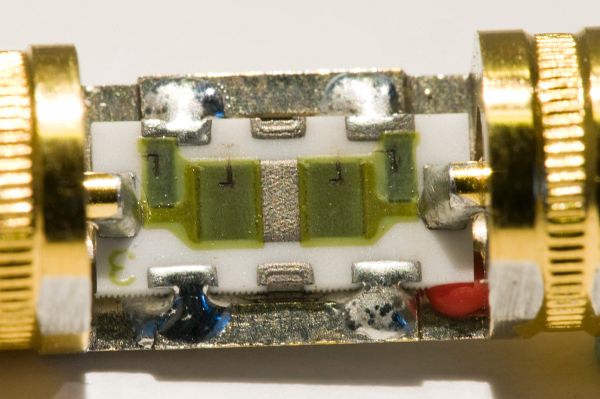
Inside the attenuator, there is a small substrate with four laser trimmed thick film resistors forming the pi-topology attenuator. See my article about pi and T attenuators for more information about attenuator design.
The attenuator contains a continuous brass structure making up both connectors as well as the base on which the substrate is mounted.The attenuator substrate viewed from the side.The substrate from the top. The dark L-shapes into the green thick film resistors are probably the marks left by laser trimming.
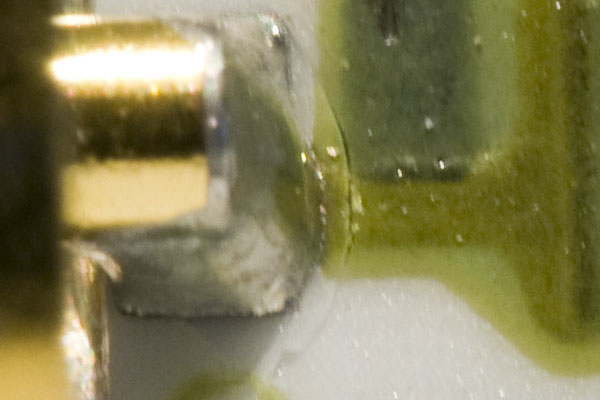
At first glance it was not obvious what was broken inside the device, but there had to be a crack or something between the left connector terminal and the substrate in the photo above. If one looks carefully, it is possible to see that there is indeed a crack around the solder joint. The photo below shows a zoomed in version where the microscopic crack is quite visible.
The crack that prevents the attenuator from working.
A possible cause for the crack is if an SMA connector with a misaligned center pin was forced into the connector of the attenuator, causing the terminal to be pushed harder towards the substrate than what it could handle.
So, this is what Mini-Circuits’ low-cost 1 W attenuators look like inside. A custom machined brass body onto which a substrate with laser trimmed resistors are mounted.
I am taking care of a number of Sportident units, which are used in the sport of orienteering. These are small embedded systems powered by non-rechargeable lithium batteries, specifically thionyl chloride (Li-SOCl2) batteries, and every few years the batteries need to be replaced, depending on how much the unit has been used. The units themselves tries to keep track of the battery status by dead reckoning and by measuring the battery voltage, apparently while it is doing something that consumes current. The state of the battery voltage under load can be read out as can the value of the estimated remaining capacity.
To help in determining the status of such batteries, I wanted to have a device that could measure the voltage and the internal resistance in a convenient manner. I had a Teensy laying around and since it has a DAC output and several analog inputs, it looked like a good platform to quickly hook something together that could do the task.
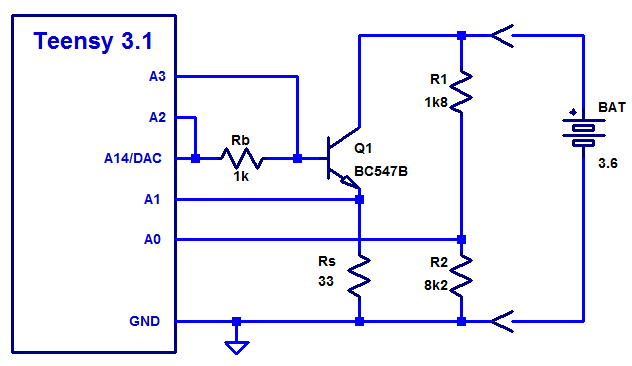
This is the schematics I came up with:
The schematic of the Teensy-based battery impedance tester.
The circuit works like this:
R1 and R2 forms a voltage divider that reduces the battery voltage to below 3.3 V which is the limit of the ADC of the Teensy. Q1 and Rs forms a current sink controlled by the voltage on the A14/DAC pin. Basically the DAC pin sets the base voltage and since the base-emitter voltage is fairly constant, a constant voltage will develop over the emitter resistor Rs. To maintain this voltage Q1 will conduct as much current as required from the battery. The emitter current can be measured by measuring the voltage drop across Rs using analog input A1.
The purpose of having A2 and A3 connected across the base resistor is to be able to measure the (small) base current so that it can be subtracted from the emitter current when calculating the battery current. This is only a small correction and not really important, but since the inputs were available and it was easy to do, I added this little feature.
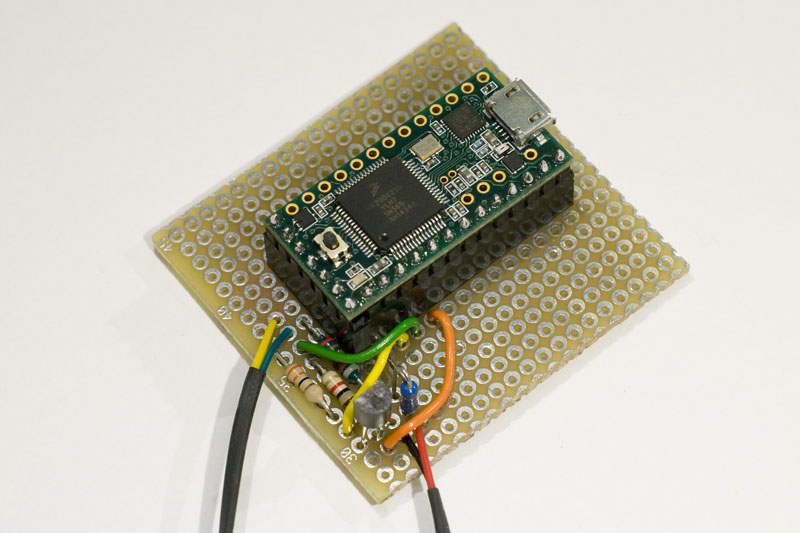
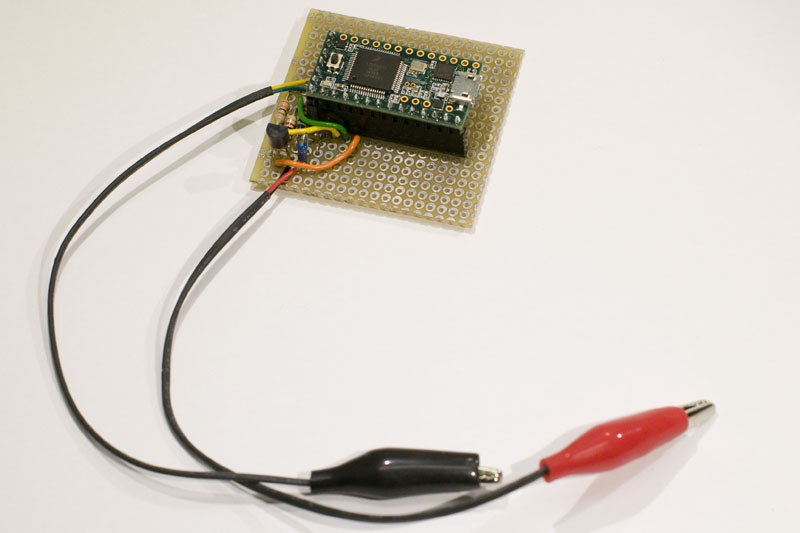
I built the physical circuit on perfboard and it looks like this:
The battery tester board.The battery tester board with clips.
As can be seen, the whole thing is very simple to build as the Teensy does all the heavy lifting.
I did of course need a program to control the whole thing and do all the measuring, calculations and presentation of results. This is the program I came up with:
/* Lithium battery tester
Tests the internal resistance of a small 3.6 V lithium battery by ramping up the load current and measuring
the pole voltage and calculating the internal resistance.
Written by Per Magnusson, http://www.axotron.se
v 0.1 2015-05-24
This program is public domain.
*/
const float Rtop = 1817; // Top resistor of divider, ohms
const float Rbot = 8170; // Bottom resistor of divider, ohms
const float Rs = 32.8; // Current sense resistor, ohms
const float Rb = 995; // Base resistor, ohms
const float Vref = 3.3; // ADC reference voltage, volts
const int ADCbits = 12;
const int DACbits = 12;
const float voltPerADC = Vref/((1<<ADCbits) - 1.0); // Factor to convert ADC codes to volts
const float voltPerDAC = Vref/((1<<DACbits) - 1.0); // Factor to convert DAC codes to volts
const float DACperVolt = 1/voltPerDAC; // Factor to convert volts to DAC codes
const int detectLimit = 0.8/voltPerADC; // Limit for detecting battery
const float curLim = 35.0e-3; // Maximum test current in A
const float curStep = 5.0e-3; // Target current step
const int maxIter = 3; // Number of iterations to reach target current
const int vsensePin = A0; // Voltage sense pin
const int curSensePin = A1; // Emitter current sense pin
const int baseSenseHiPin = A2; // High base current sense pin
const int baseSenseLoPin = A3; // Low base current sense pin
const int dacPin = A14; // Current control pin
const int ledPin = 13; // LED for debug
const byte sWaitNoBat = 0;
const byte sWaitBat = 1;
byte state;
void setup() {
Serial.begin(57600);
analogWriteResolution(DACbits);
analogReadResolution(ADCbits);
analogWrite(dacPin, 0);
pinMode(ledPin, OUTPUT);
state = sWaitNoBat;
Serial.println("Battery tester");
digitalWrite(ledPin, HIGH); // turn LED on
delay(3000);
digitalWrite(ledPin, LOW); // turn LED off
Serial.println("Waiting for a battery to be connected...");
}
void loop() {
int voltCode;
int baseVoltCode;
int curCode;
int dacVal;
int dacStep;
float volt;
float voltNoLoad;
float curNoLoad;
float cur;
float baseCur;
float res;
float prevCur;
float targCur;
float stepCur;
byte testBat;
byte iter;
analogWrite(dacPin, 0); // Make sure we are not loading the battery in this state
testBat = false;
voltCode = analogRead(vsensePin); // Read battery voltage to see if it is connected
if(state == sWaitNoBat) {
// We are waiting for at battery to be connected
if(voltCode > detectLimit) {
// A battery was connected
testBat = true; // Proceed to test it
}
} else if(state == sWaitBat) {
// We are waiting for a battery to be disconnected
if(voltCode < detectLimit) {
// A battery was disconnected
Serial.println("\nWaiting for a battery to be connected...");
delay(1000); // Delay to not react on glitches while the battery is being disconnected
state = sWaitNoBat;
}
}
if(!testBat) {
// Not in a situation that a battery should be tested
return;
}
// Test the battery
Serial.println("Battery connected, waiting for connection to stabilize.");
delay(1000); // Wait for the connection to stabilize
voltCode = analogRead(vsensePin);
if(voltCode < detectLimit) {
// The battery is gone, it was just a glitch
state = sWaitNoBat;
Serial.println("Battery removed, aborting.");
Serial.println("Waiting for a battery to be connected...");
return;
}
digitalWrite(ledPin, HIGH); // turn LED on
Serial.println("Testing battery.");
voltNoLoad = voltCode * voltPerADC * (Rtop+Rbot)/Rbot;
volt = voltNoLoad;
curNoLoad = voltNoLoad/(Rtop+Rbot); // "No load" current
Serial.println("");
Serial.print("Unloaded voltage: ");
Serial.print(voltNoLoad);
Serial.print(" V (current = ");
Serial.print(curNoLoad*1000);
Serial.println(" mA)");
// Ramp up the current
cur = 0;
targCur = 0;
dacVal = 0.66*DACperVolt; // Base drive starting value, 0.66 V, low current
dacStep = 5.0e-3*Rs*DACperVolt; // Increment ~5 mA per iteration
prevCur = 0;
iter = maxIter; // First step is to read whatever current the starting DAC value results in
// Loop to set a number of different battery test load currents and measure the battery performance at each current
while(1) {
if(targCur > curLim) {
// We are beyond the maximum target current, normal exit from loop
break;
}
if(dacVal >= (1<<DACbits)) {
// The DAC value is too big, exit from loop
Serial.print("Warning: Above maximum DAC setting (");
Serial.print(dacVal);
Serial.println("), exiting");
break;
}
analogWrite(dacPin, dacVal); // Drive the base of the transistor
delay(10);
voltCode = analogRead(vsensePin); // Battery voltage reading
volt = voltCode * voltPerADC * (Rtop+Rbot)/Rbot; // Calculate battery voltage
baseVoltCode = analogRead(baseSenseHiPin) - analogRead(baseSenseLoPin); // Read voltage drop across base resistor
baseCur = baseVoltCode * voltPerADC/Rb; // Calculate base current
curCode = analogRead(curSensePin); // Emitter current reading
// Calculate battery current and compensate for base current and divider current
cur = curCode * voltPerADC/Rs - baseCur + curNoLoad;
if(voltCode < detectLimit) {
// The voltage is too big, exit from loop
Serial.print("Warning: Below minimum battery voltage (");
Serial.print(volt);
Serial.println(" V), exiting");
break;
}
if((cur - curNoLoad) > 0) {
res = (voltNoLoad - volt)/(cur - curNoLoad); // Calculate internal resistance
} else {
res = 0; // Avoid dividing by zero
}
if(iter < maxIter) {
// Make a small adjustment to get closer to the target current
if(cur != prevCur) {
dacVal += dacStep*((targCur-cur)/(cur-prevCur));
}
iter += 1;
} else {
// Print result
Serial.print("Voltage: ");
Serial.print(volt);
Serial.print(" V");
Serial.print(" Current: ");
Serial.print(cur*1000);
Serial.print(" mA");
Serial.print(" Resistance: ");
Serial.print(res);
Serial.println(" ohms");
// Move to next target current
targCur += curStep;
if(prevCur > 0 && (cur-prevCur > 0)) {
// Estimate the step size required to reach the next target current
dacStep = dacStep*((targCur-cur)/(cur-prevCur));
}
dacVal += dacStep;
prevCur = cur;
iter = 0;
}
if(cur > curLim*1.2) {
// The current is too big, exit from loop
Serial.print("Warning: Maximum current exceeded (");
Serial.print(cur);
Serial.println(" mA), exiting");
break;
}
}
analogWrite(dacPin, 0); // Stop the battery current drain
digitalWrite(ledPin, LOW); // turn LED off
state = sWaitBat;
Serial.println("Done");
Serial.println("Disconnect battery.");
}
The program sends information to a serial terminal (I used the one inside the Arduino development environment). It waits for a battery to be connected and then ramps up the current and reports the pole voltage as well as the internal resistance at a couple of different load currents. This is what the output can look like:
Waiting for a battery to be connected...
Battery connected, waiting for connection to stabilize.
Testing battery.
Unloaded voltage: 3.67 V (current = 0.37 mA)
Voltage: 3.63 V Current: 1.39 mA Resistance: 39.36 ohms
Voltage: 3.47 V Current: 4.97 mA Resistance: 41.95 ohms
Voltage: 3.27 V Current: 9.99 mA Resistance: 41.26 ohms
Voltage: 3.08 V Current: 15.03 mA Resistance: 40.23 ohms
Voltage: 2.89 V Current: 19.98 mA Resistance: 39.33 ohms
Voltage: 2.72 V Current: 24.97 mA Resistance: 38.56 ohms
Voltage: 2.54 V Current: 29.99 mA Resistance: 37.88 ohms
Voltage: 2.37 V Current: 34.99 mA Resistance: 37.33 ohms
Done
Disconnect battery.
With a different program, the circuitry can of course also be used to test batteries in different ways.
Update on 2015-10-11
As requested by Alex in the comments, here is a picture of the bottom side of the board (and the corresponding picture of the top).
Jag har tidigare (här och här) skrivit om problem jag haft med Bahnhofs IP-telefoni och hur jag löst dem.
Idag drabbades jag av ett nytt problem. Webbservern som den här bloggen ligger på och som alltså finns hemma hos mig, gick inte att komma åt utifrån. Istället möttes man av inloggningsrutan för SIP-boxen (Eltek R7121-L1). Jag misstänker att någon inställning råkat ändras på Bahnhofs sida, för själv har jag inte loggat in på SIP-boxen på väldigt länge. Och när jag i samband med de tidigare bloggposterna pratade med supporten så var det de som till slut gjorde någon inställning som bryggade SIP-boxen så att den kunde sitta mellan fibern och min router utan att den spärrade inkommande trafik till min webbserver. Nu tycktes alltså SIP-boxen inte längre vara bryggad.
Det här fick mig att till slut få tummen ur och slå av inställningen WAN / NAT Passthrough / SIP Passthrough i ASUS-routern RT-N56U jag har och flytta SIP-boxen så att den sitter efter routern och inte mellan fibern och routern. Tipset om den här inställningen gavs i tidigare kommentarer av Christian och Magnus F. Port forwarding till IP-adressen för SIP-boxen så som Bahnhof rekommenderar för denna konfiguration hade jag redan ställt in:
Efter omkopplingen verkar allt fungera smärtfritt. Man ser inte längre inloggningsfönstret för R7121-L1 när man surfar till axotron.se, IP-telefonin verkar fungera (ljud åt båda hållen för både inkommande och utgående samtal) och webbservern är åter tillgänglig från omvärlden. En bonus är att jag nu slipper 100 Mbit/s-begränsningen som SIP-boxen införde när den satt före routern. Hastigheten enligt Bredbandskollen är nu 126 Mbit/s istället för som tidigare strax under 100 Mbit/s. Ingen skillnad som lär märkas särskilt ofta, men det är ju knappast någon nackdel.
Jag undrar om det är Bahnhof som råkat ändra inställningarna i min SIP-box och varför det i så fall hände. Eftersom allt löste sig ganska snabbt så har jag inte ringt supporten och frågat.