Den här artikeln publicerades först i QTC nr 5 2023.
Via SM0GNS Peder fick jag tag på en ganska komplett byggsats för kretskortet till en ROX-2X radiopejlmottagare [1] för 2-m-bandet. Antagligen hade Peder tröttnat på att jag lånat färdigbyggda mottagare av honom och tyckte det var dags att jag skaffade en egen, vilket jag inte var sen att nappa på.
Efter att jag lött ihop mottagaren och verifierat att den fungerade så började jag fundera på om den skulle gå att förbättra på något sätt. Främst var jag intresserad av att få till en digitalt styrd lokaloscillator för att eliminera risken att man har fel frekvens inställd, till exempel till följd av att man oavsiktligt kommer åt frekvensratten under en tävling, men jag hittade även ett par andra saker som kunde åtgärdas och några extra finesser att lägga till. Dessutom hittade jag på en egen antennkonstruktion som verkar fungera bra.
Den här artikeln beskriver hur mottagaren fungerar och vad jag gjorde för förändringar i den. Jag har inte haft tillgång till någon bygg-, komponent- eller funktionsbeskrivning utöver vad som finns på [1], så det jag skriver är mestadels baserat på schemat och egna tester.
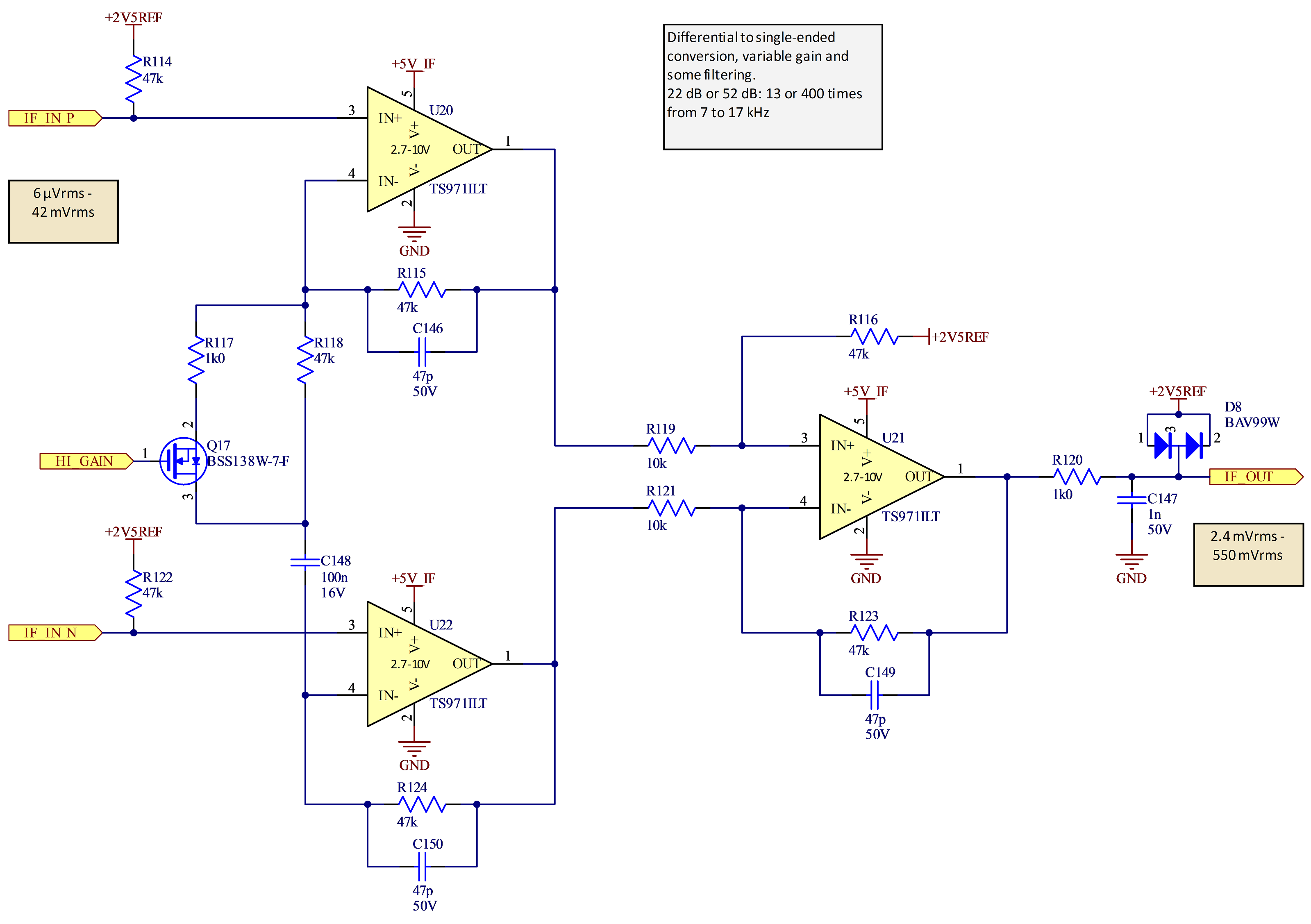
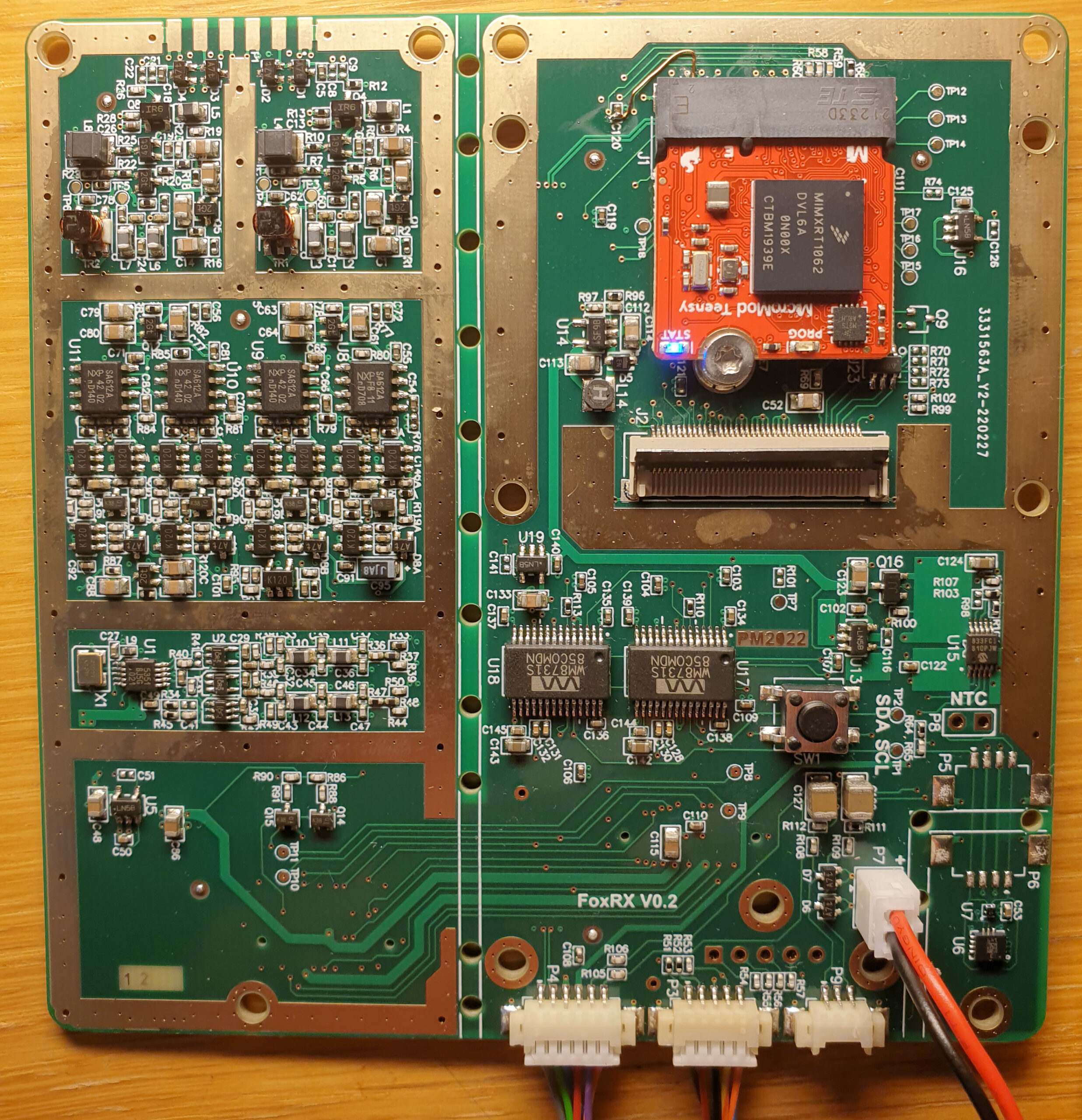
Figur 1 visar schemat för ROX-2X med rutor som markerar vilka delar jag kommer att ändra.
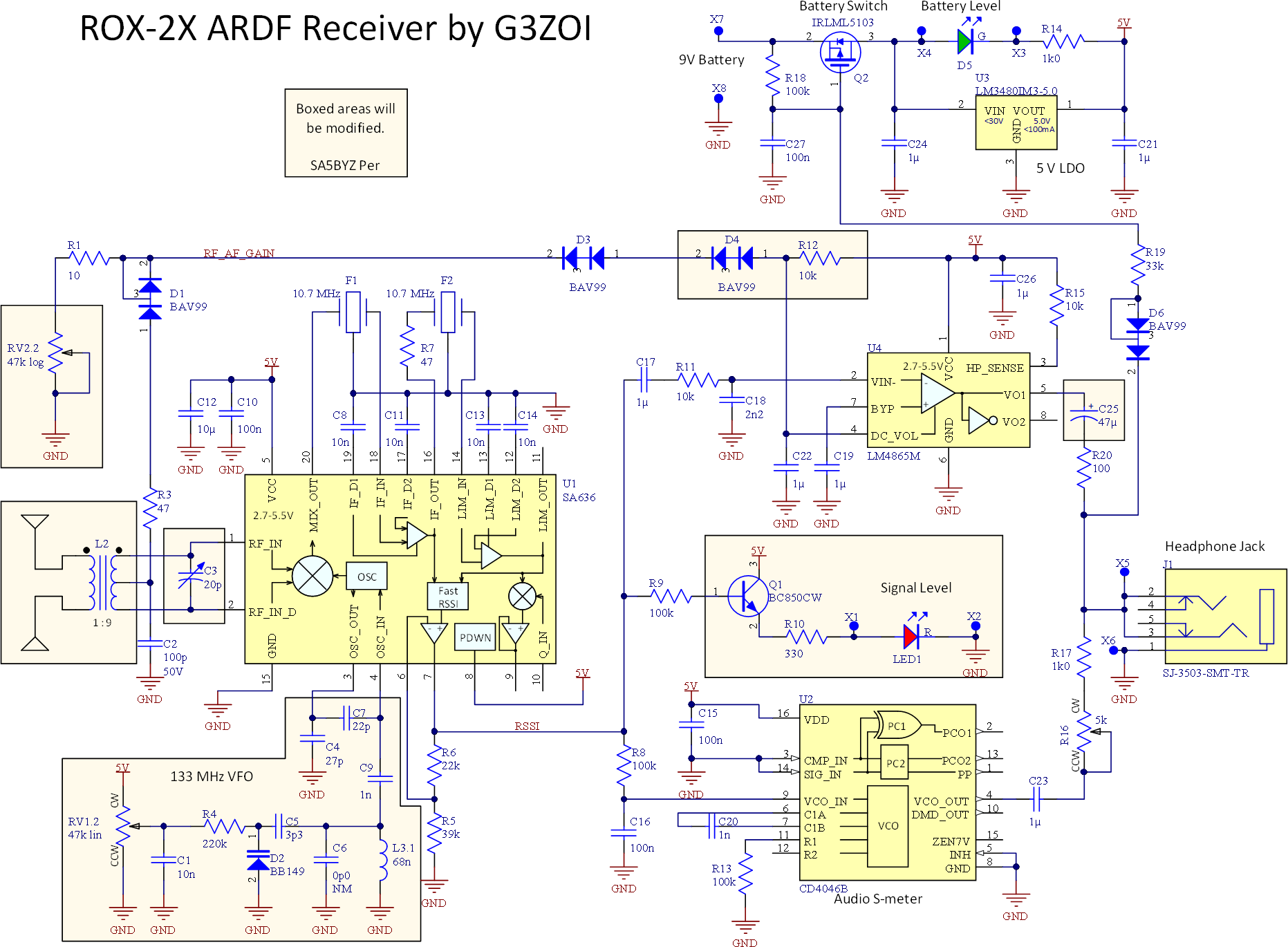
Figur 1. Kopplingsschemat för ROX-2X.
Jag har ritat om schemat för att göra det aningen mer lättläst och för att enkelt kunna rita in ändringar (och för att jag inte bett om tillåtelse att återpublicera originalschemat). En liten detalj som jag fixat redan här är att den gröna lysdioden D5 som visar att spänningen är påslagen var felvänd i originalschemat.
RF-delarna sköts av en SA636 som är en krets främst tänkt för FM-mottagning i exempelvis DECT-telefoner. Tyvärr har den slutat tillverkas och är nog svår att få tag på, så inget att basera framtida konstruktioner på, men ett antal exemplar av ROX-2X lär finnas därute och många av idéerna här är mer allmänt tillämpliga, så förhoppningsvis är den här artikeln ändå av intresse.
Radiopejling på 2-m-bandet sker med sändare som skickar ut morsekod genom att AM-modulera en bärvåg. Så hur kan en krets för FM-mottagning fungera i detta sammanhang? Tricket är att man inte alls använder de vanliga utsignalerna, utan bara lyssnar på RSSI- utgången (Received Signal Strength Indicator). SA636 har nämligen en snabb RSSI som duger som AM-demodulator i denna tillämpning. En annan kreativ lösning i konstruktionen är att förstärkningen delvis ställs in genom att tappa av bias-ström på RF-ingångarna. Att detta fungerar kan man möjligen ana sig till av databladet som visar ett förenklat schema av ingångssteget, men möjligheten verkar inte alls nämnas där. Kanske är det något konstruktören experimenterat sig fram till.
Ingångsimpedansen är ganska hög, 700 Ω parallellt med 3.5 pF single-ended, dvs 1400 Ω parallellt med 1.75 pF differentiellt, så anpassningen mot Yagi-antennens impedans i trakterna av 40 ohm mår bra av en ganska rejäl upptransformering av impedansen med en faktor 9 (1:3 varvtalsförhållande) via transformatorn L2. Med trimkondensatorn C3 kan man avstämma anpassningen. Mer om det senare.
Mellanfrekvensen är på klassiska 10,7 MHz och två keramiska filter för denna frekvens vaskar fram den önskade signalen. Antennen och dess matchningskomponenter får duga som preselektorfilter före mixern för att undertrycka det oönskade sidbandet.
Lokaloscillatorn är LC-baserad och avstäms med en kapacitansdiod (D2) som biaseras av en potentiometer (RV1.2). Spolen (L3.1) har en kärna man måste trimma för att hamna i rätt frekvensområde.
RSSI-signalen innehåller dels den önskade AM-demodulerade audiosignalen (om än logaritmiskt demodulerad, men låg distorsion är inte en prioritet här) och dels en DC-nivå som indikerar signalstyrka även den tid då modulering saknas. Sändare kan antingen slå av bärvågen mellan morsepipen eller låta bärvågen ligga kvar omodulerad. I det senare fallet finns det en radiosignal att pejla mot hela tiden under ett sändningspass, alltså även när den AM-demodulerade signalen inte innehåller något hörbart, och det drar den här mottagaren nytta av som vi ska se.
RSSI-signalen förgrenas dels till en förstärkare, U4, som driver hörlurarna med den demodulerade signalen, dels via ett lågpassfilter, R8-C16, till en spänningsstyrd oscillator, U2, och dels till transistorn Q1 som ska tända lysdioden LED1 vid stark signal.
U4 har en volymkontrollingång, ben 4, som påverkas av samma volymkontroll, RV2.2, som justerar biasen på RF-ingångarna enligt tidigare beskrivning. Jag är osäker på hur mycket av känsligheten som bestäms av den justerbara biaseringen av RF-ingången respektive av U4. U4 har enligt databladet ett förstärkningsområde mellan ungefär -70 och +20 dB, men toleransen på vilken förstärkning man får för en viss styrspänning är hög, så olika exemplar av kretsen kan ha rejält olika förstärkning vid en och samma spänning. Men det är inte något större problem i den här tillämpningen.
Jag upplevde att den maximala ljudstyrkan var onödigt hög, så för att minska den kopplade jag om lite så att styrspänningen tas från en punkt som ligger ett diodfall lägre än normalt. Det krävde en kapad kopparbana vid ben 4 på U4 samt en kort bygel från C22 till ben 3 på D4. En alternativ och enklare lösning hade varit att öka värdet på R20 som ligger i serie med hörlurarna.
Ytterligare en åtgärd för att minska maximal ljudstyrka, och samtidigt göra en större del av volymrattens område användbart, var att sätta 22 k parallellt med volympotten RV2.2.
En viktig finess i mottagaren är den RSSI-styrda VCO:n U2 som används som en ”audio S-meter”. När RSSI-signalen blir tillräckligt hög börjar U2 oscillera, först med ett lågfrekvent tickande och sedan med allt högre frekvens i takt med att radiosignalen blir starkare (eller biaseringen av RF-ingången ökas). Även denna VCO-signal är kopplad till hörlurarna och den gör att det blir lättare att med hörseln avgöra små skillnader i signalstyrka eftersom de representeras med skillnader i frekvens istället för med skillnader i amplitud. Det här är väldigt användbart eftersom antenndiagrammet är ganska trubbigt, så det blir viktigt att särskilja små variationer i signalstyrka för att avgöra i vilken riktning som signalen är starkast när man sveper med antennen under pejlingen. Och som nämnts tidigare så hörs denna ton även mellan morsepipen när den vanliga audiosignalen är tyst (såvida det inte är en sändare som stänger av bärvågen mellan pipen).
Nivån på den RSSI-signal som styr U2 bestäms dels av radiosignalens styrka och dels av vilken förstärkning man ställt in på RF-ingången, men inte av den ytterligare förstärkningen i U4. Det är bara under ca halva området för volymratten som RF-förstärkningen påverkas, så när man vridit upp volymen till mer än ca hälften av max så blir inte RSSI-signalen som styr U2 högre. Vid svaga radiosignaler räcker nivån inte till att få igång U2, oavsett volyminställning, så när man är långt från sändaren får man förlita sig på den vanliga ljudstyrkan när man pejlar.
Den tredje grenen av RSSI-signalen går som sagt till Q1 och LED1. Tanken är att lysdioden ska tändas när RSSI-signalen blir stark nog, men detta fungerade inte alls. För att LED1 ska börja tändas måste nämligen RSSI bli högre än Vbe för Q1 (0,6 V) plus spänningsfallet över LED1 (ca 2 V), men den nivån uppnåddes aldrig. Antagligen fungerade det i en tidigare version av konstruktionen när R6 (som bestämmer förstärkningen hos RSSI-förstärkaren i U1) var 33k istället för 22k, men alltså inte med R6 = 22k. Med lite kreativ omkoppling så att LED1 hamnar i kollektorkretsen för Q1 istället för vid emittern, samt tillägget av ett spänningsdelande motstånd på basen så återställdes funktionen. De schemamässiga ändringarna framgår av figur 2 medan de fysiska ändringarna är utpekade i figur 3 med numrerade pilar som pekar ut följande detaljer:
- R100, 150 kohm från högra änden av R9 (basen på Q1) till jord.
- Kollektorn, ben 3, på Q1 svävar i luften. Till kollektorn är en sladd som leder till katoden på LED1 kopplad. Tunn emaljerad koppartråd användes för att inte riskera att bryta sönder Q1 när sladden rör sig.
- En tråd som kopplar emittern på Q1 till jord.
- R10 (330 ohm) har flyttats från sin ordinarie plats till mellan 5V och anoden på LED1.
- Sladden till anoden på LED1.
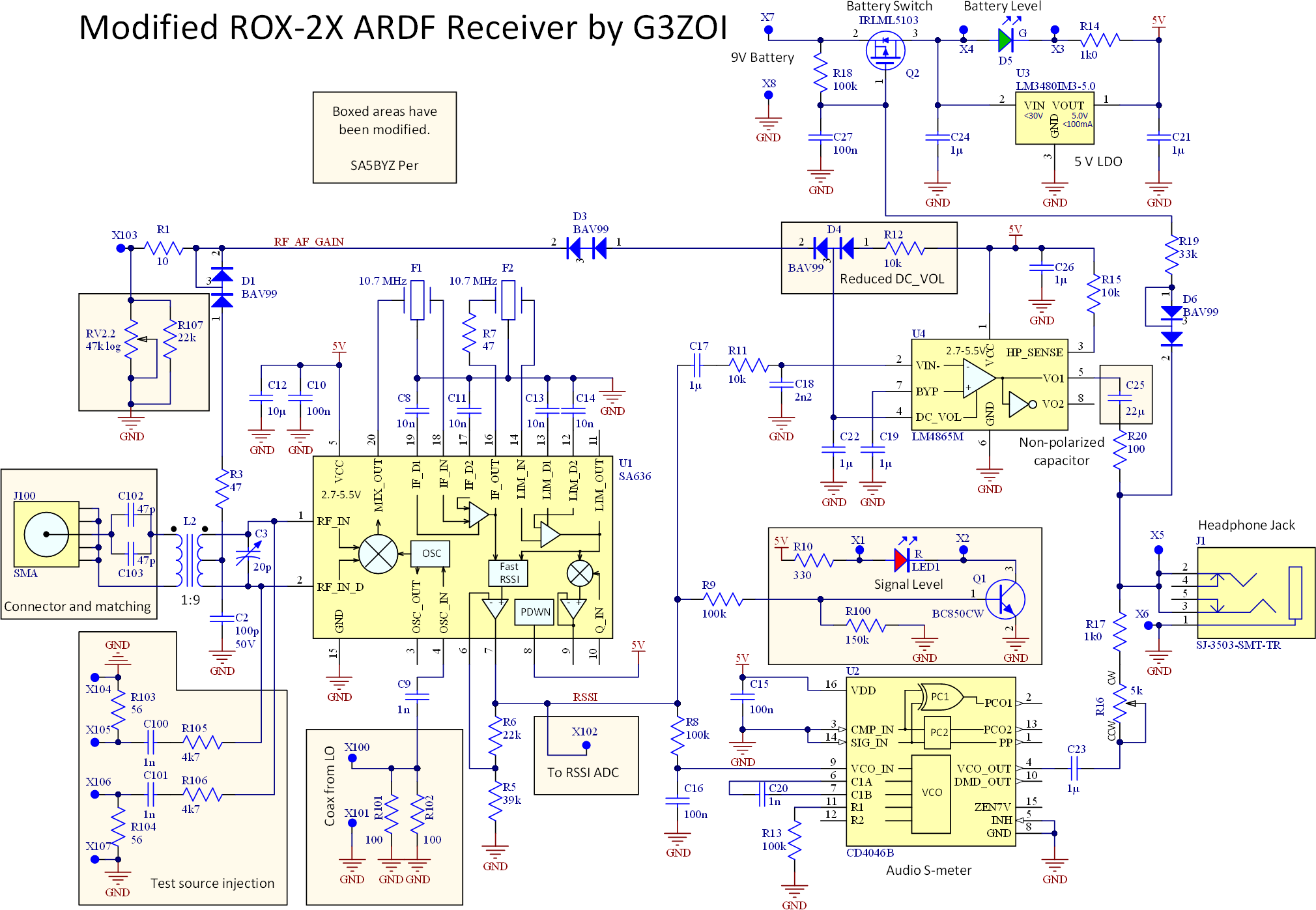
Figur 2. Modifierat kopplingsschema för ROX-2X.
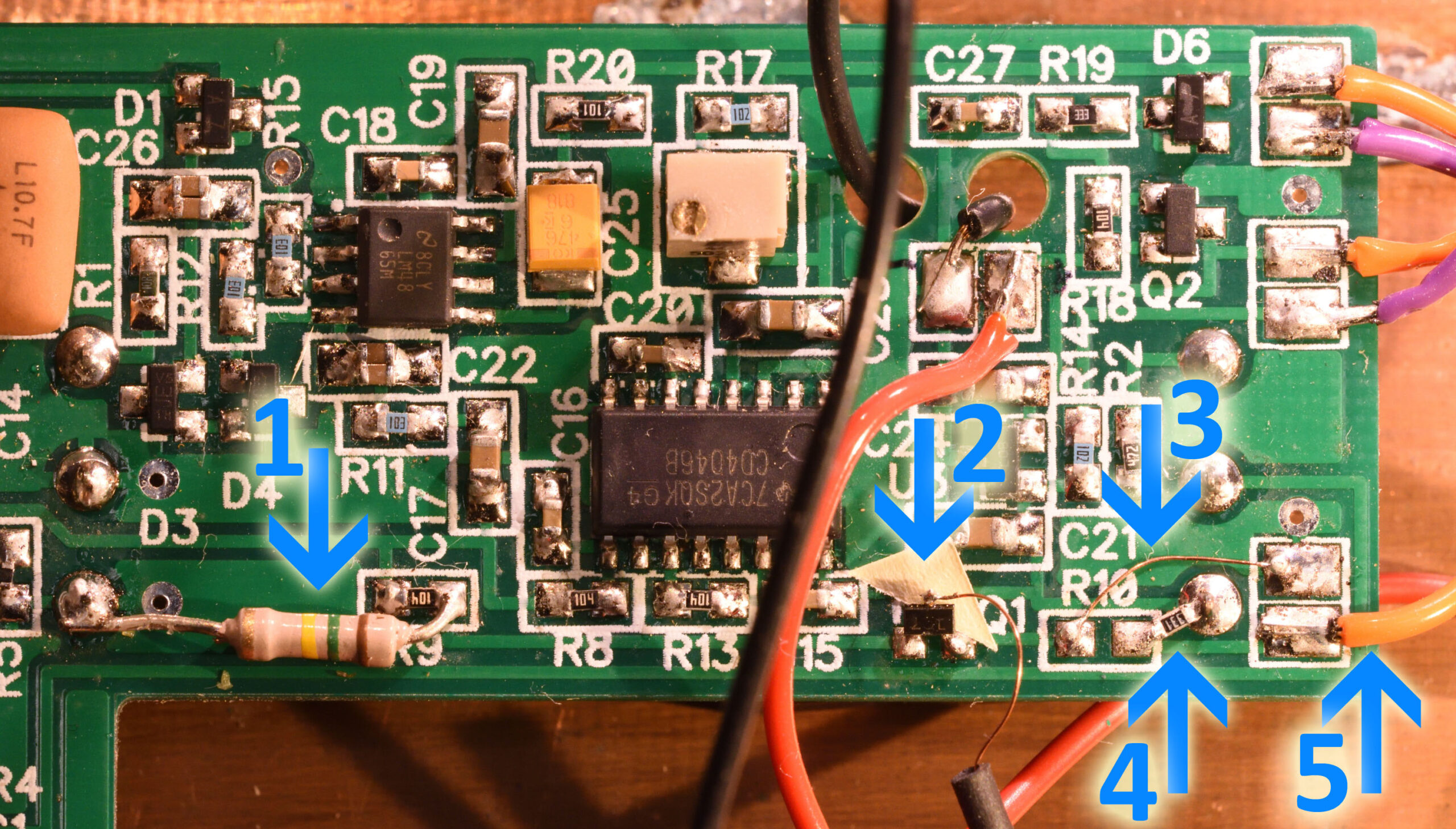
Figur 3. Modifieringar för att få LED1 att fungera som avsett.
Det är tänkt att man inte ska behöva någon strömbrytare till mottagaren. Detta åstadkoms genom att gaten på PMOS-transistorn Q2 dras upp till 9 V av R18 när ingen hörlur är inkopplad. Q2 slår då av och resten av konstruktionen blir utan matning. När en hörlur är inkopplad dras gaten låg och Q2 börjar leda. Regulatorn U3 skapar en stabil 5-V-matning och lysdioden D5 indikerar att strömmen är på och att batterispänningen är högre än dryga 7 V (5 V plus spänningsfallet på ca 2 V över D5 plus lite spänning till strömbegränsaren R14). Genom att D5 sitter parallellt med spänningsregulatorn får man dels en sorts lågt-batteri-varning och dels slipper man slösa extra ström till denna diod eftersom all ström som flyter genom den också går vidare och gör nytta i resten av elektroniken. Hade dioden inte suttit där hade dess energiförbrukning istället omvandlats till värme i U3.
Tyvärr ville inte den hörlursstyrda strömbrytarfunktionen fungera. Efter lite felsökande upptäckte jag att C25, som är ritad som en polariserad kondensator i schemat, inte alls får vara polariserad. Jag hade satt dit en tantal, men i fallet att ingen hörlur är inkopplad kommer R18+R19+D6+R20 att lägga på en spänning med fel polaritet på denna, med läckström som resultat. Läckströmmen gör att gaten på Q2 inte blir hög nog för att Q2 ska slås av, så strömbrytningsfunktionen fungerade inte.
Lösningen är enkel, nämligen att ersätta C25 med en opolariserad keramisk kondensator. Om man tittar på foton på kretskortet på [1] så ser man att där sitter en keram och inte en tantal, så det är bara schemat som är lite vilseledande. Jag blev i alla fall fintad och hann konstruera in en fysisk strömbrytare som fortfarande finns kvar i mitt bygge.
Den stora förändringen jag ville göra var dock som sagt att införa en digitalt styrd lokaloscillator. Vidare ville jag hålla detta projekt någorlunda enkelt (betydligt mycket mindre ambitiöst än 80-m-mottagaren jag beskrev i en tidigare artikel [2]). Specifikt ville jag undvika att behöva konstruera (och vänta på tillverkningen av) nya mönsterkort och helst också klara mig med att använda komponenter som jag redan hade hemma. Dessa mål uppnåddes mestadels, men tidsmässigt drog det ändå ut på tiden och blev (som vanligt?) mer omfattande än jag hade tänkt mig. Inte minst mjukvaran tog tid att utveckla och har man väl en processor så är det lätt hänt att man kommer på att man kan lägga till den ena finessen efter den andra utan att behöva så värst mycket mer hårdvara.
Som digitalt styrd LO valde jag samma flexibla PLL-krets som jag använde i [2], nämligen Si5351A. Den styrs via ett I2C-interface och kan skapa tre olika fyrkantsvågor med valbar frekvens mellan ca 2,3 kHz och 200 MHz utgående från frekvensen hos en kristall. Fyrkantsvågen måste såklart filtreras för att bli en godtagbar sinus, vilket är vad som behövs för LO-ingången på SA636. Si5351A går att köpa monterad på ett litet kort tillsammans med en spänningsregulator [3] vilket gör det lätt att använda kretsen utan att göra ett eget mönsterkort.
För att skicka kommandon till Si5351A valde jag denna gång en för mig ny bekantskap, nämligen det prisvärda (runt femtilappen) och tillgängliga mikrokontrollerkortet Raspberry Pi Pico. Det innehåller en dubbelkärning ARM Cortex M0+ processor som officiellt går att klocka i upp till 133 MHz, vilket är långt mycket mer prestanda än vad som behövs här. Om man installerar rätt tillägg i senaste versionen av Arduino-miljön [4] går det bra att programmera kortet från denna för mig hemtama miljö. För att spara ström valde jag att ställa ned klockfrekvensen till 50 MHz (lägsta frekvens som är lätt inställbar i Arduinomiljön), men betydligt lägre klockfrekvenser hade också med råge gett tillräckliga prestanda.
För att det ska vara möjligt att se vad man ställt in mottagaren på för frekvens ville jag också ha någon sorts display. Jag grävde i skrotlådan och hittade en gammal 2×16 tecken alfanumerisk LCD med den vanliga HD44780 som drivkrets. Det finns färdigt stöd [5] för att prata med sådana displayer, så man behöver inte utveckla några egna lågnivårutiner.
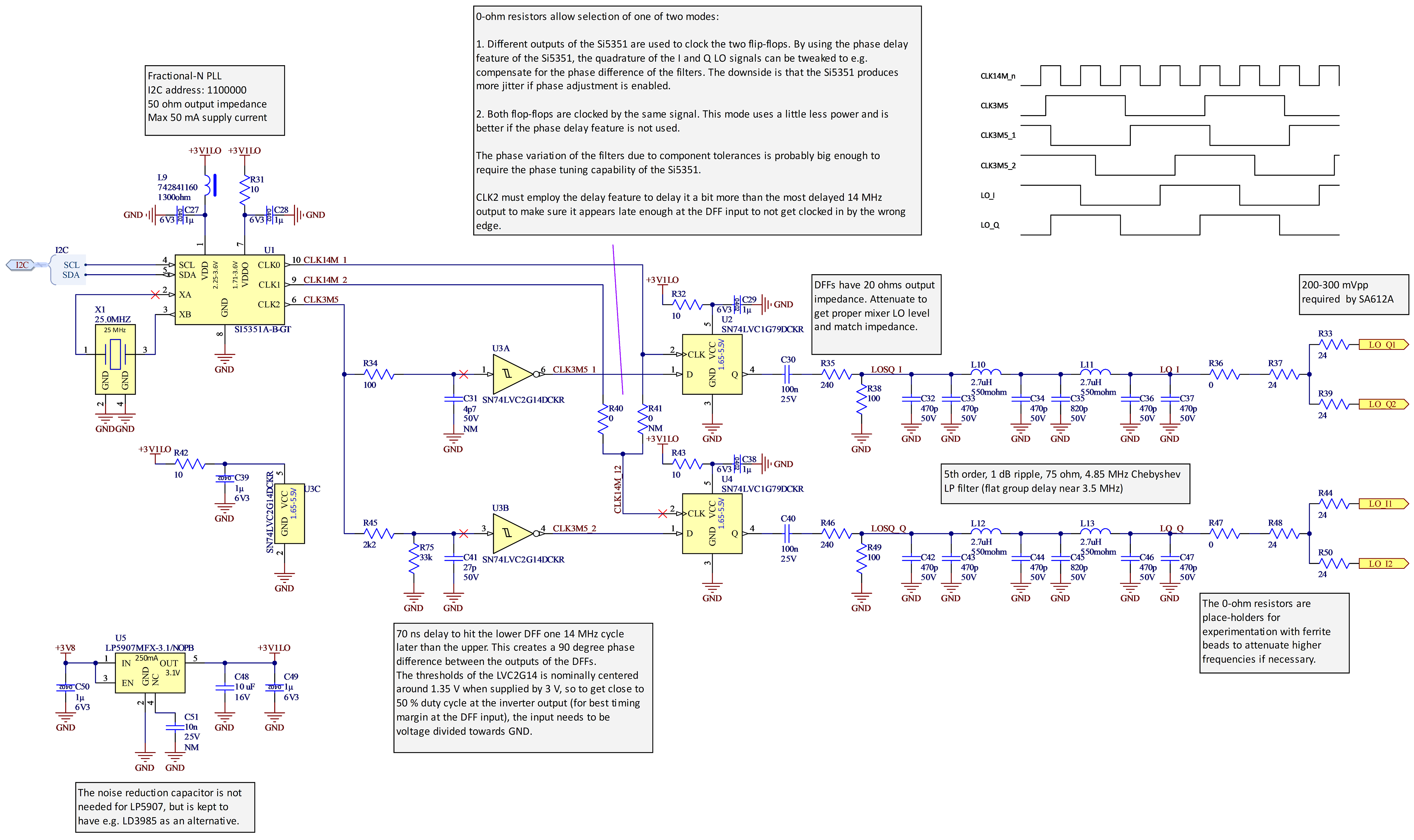
För att styra det hela använde jag en digital ratt (encoder) och fyra membranknappar, ungefär som i [2]. Mjukvaran jag skrivit går att ladda ner från GtiHub [6]. Ett schema för kopplingarna utanför det ursprungliga kretskortet finns i figur 4.
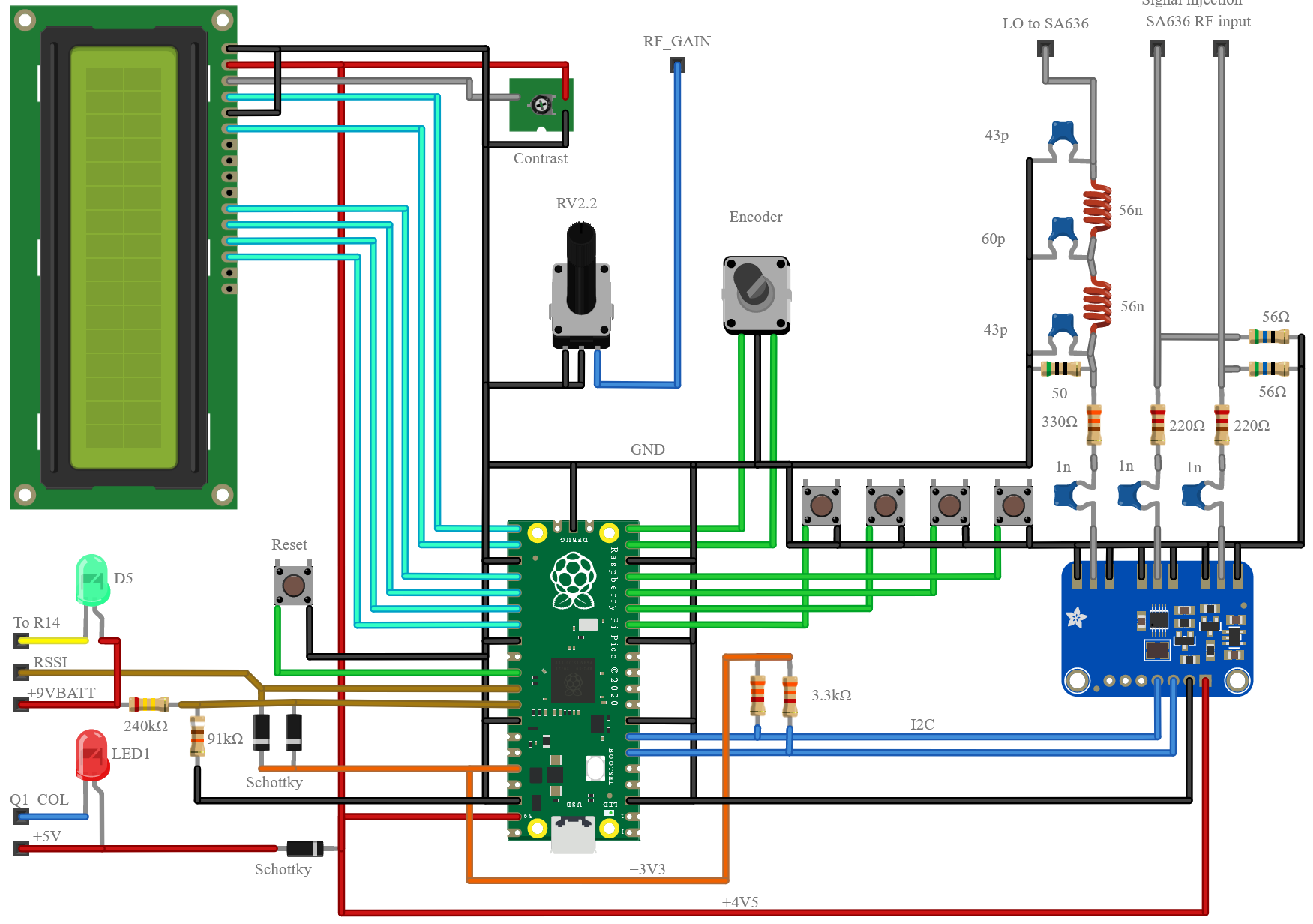
Figur 4. Schema för kopplingarna utanför ROX-2X-kortet.
Jag byggde det hela i huvudsak på ett kopparlaminat som fick fungera både som jordplan och mekanisk support. De flesta svarta ledningarna i figur 4 utgörs därför av enbart en kort ledning ner till jordplanet. För att bygga lågpassfiltret använde jag ett litet mönsterkort ämnat för sådana filterbyggen som jag hade liggande sedan tidigare projekt.
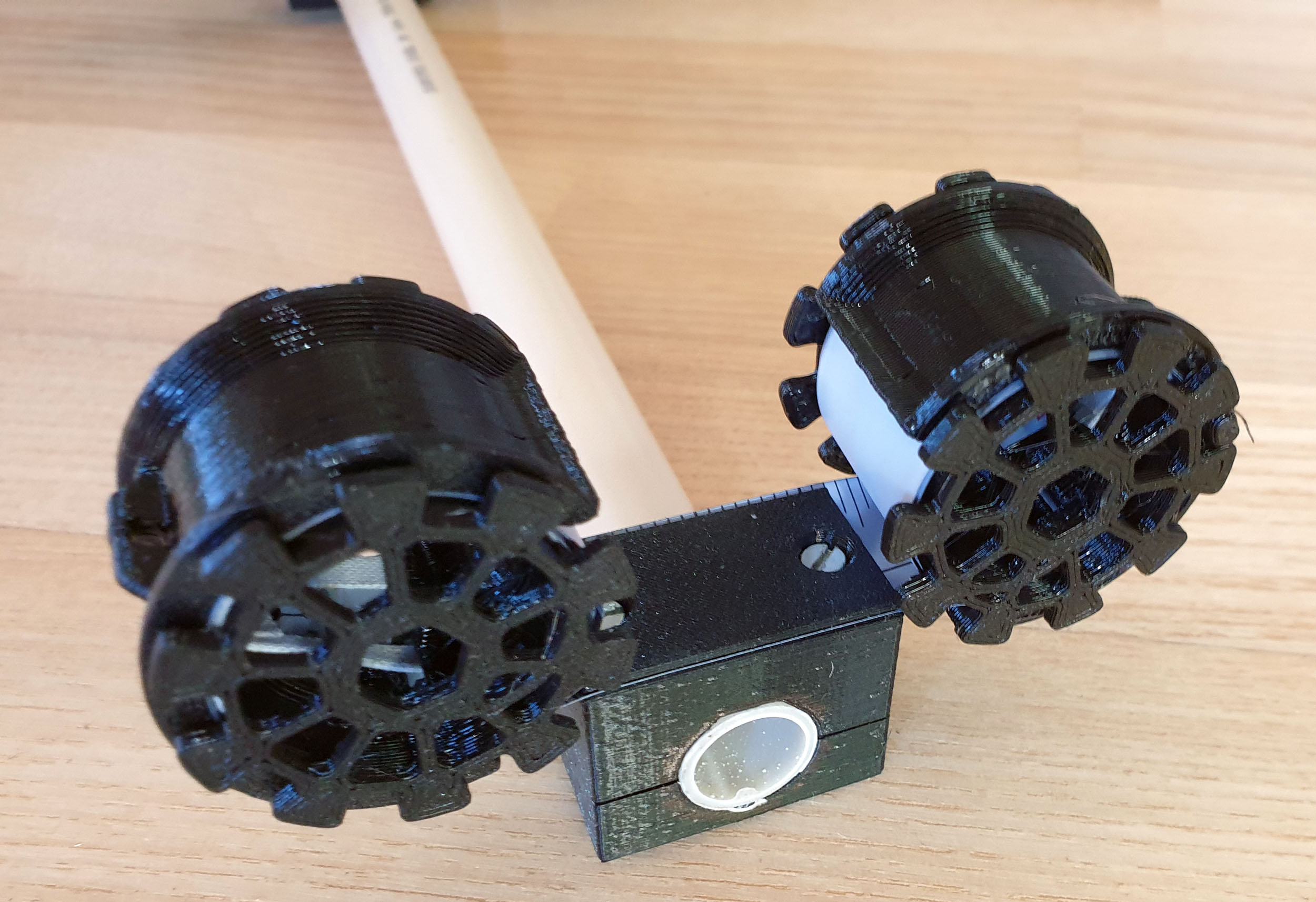
Ett foto på hur det hela ser ut i praktiken finns i figur 5. Många av ledningarna är dragna med tunna emaljerade koppartrådar. De tar liten plats, väger inte mycket, är lätta att avisolera (genom att sticka in dem i en droppe lödtenn på spetsen av en lödpenna) och lätta att få att ligga ungefär där man vill. En nackdel är att man inte får någon färgkodning, så det kan vara svårare att reda ut vilken tråd som har vilken funktion. Ledningarna till ROX-2X-kortet drog jag dock med vanliga plastisolerade kopplingstrådar. Ofta partvinnade med en referenssignal (vanligtvis jord) för att inte få en massa onödiga jordslingor som möjligen skulle kunna skicka ut eller plocka upp störningar. LO-signalen drog jag i en tunn flexibel koax (ännu inte inkopplad i figur 5).
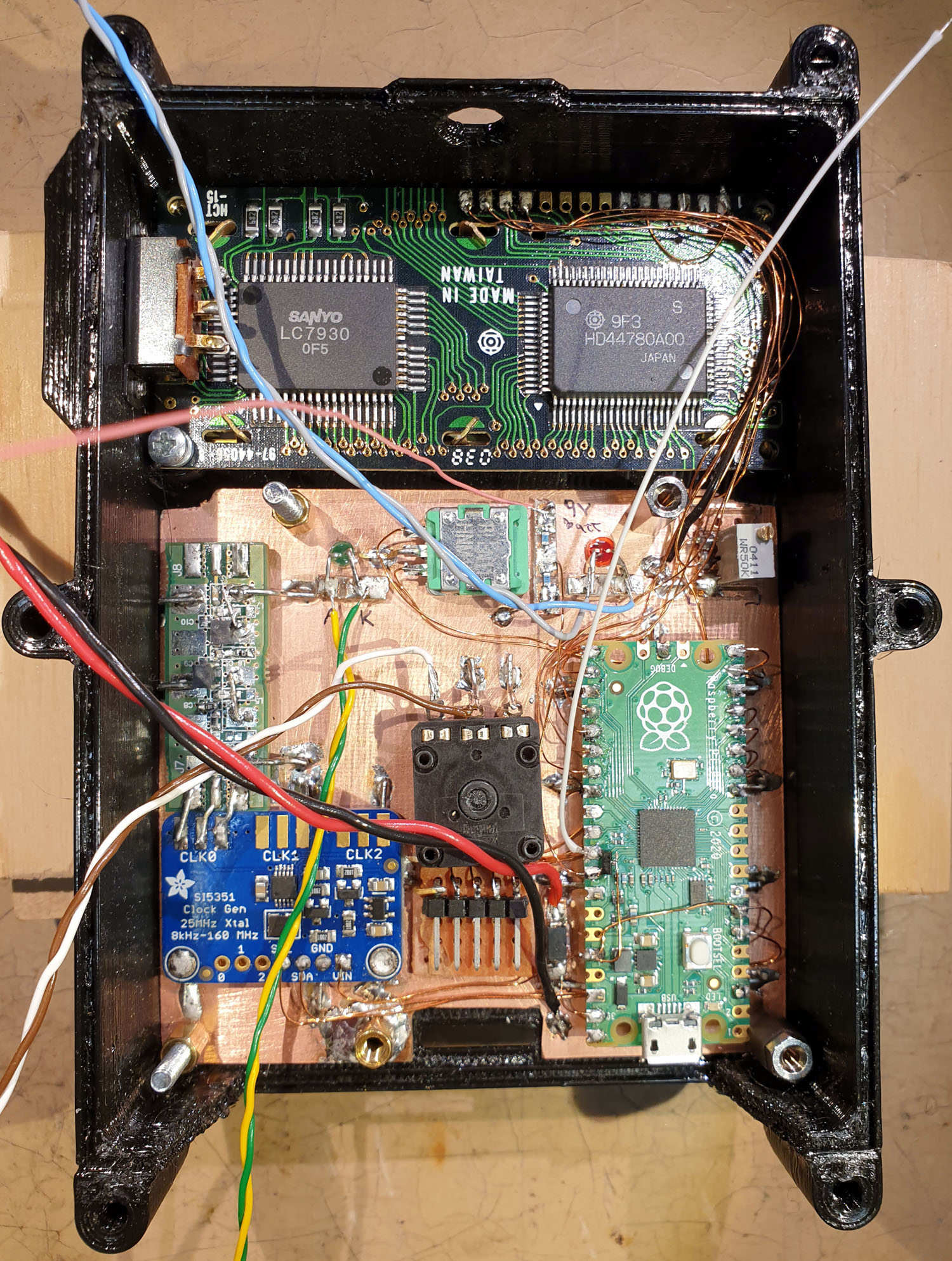
Figur 5. Display, filter, klockgenerator, processorkort mm, monterade på ett kopparlaminat i en 3D-utskriven låda.
Modifieringen av huvudkortet för att kunna koppla in den nya lokaloscillatorn beskrivs i figur 6. De olika pilarna anger följande:
- Anslutningspunkt för koaxialkabelns skärm.
- 2 st 100-ohmsmotstånd parallellt för att terminera koaxen i 50 ohm. Mittledaren på koaxen löds in på heta sidan av detta motstånd (ungefär där pil 3 pekar).
- Kapad ledning mot L3.
- C4 är bortplockad.
- C7 är bortplockad.
- C5 är bortplockad.
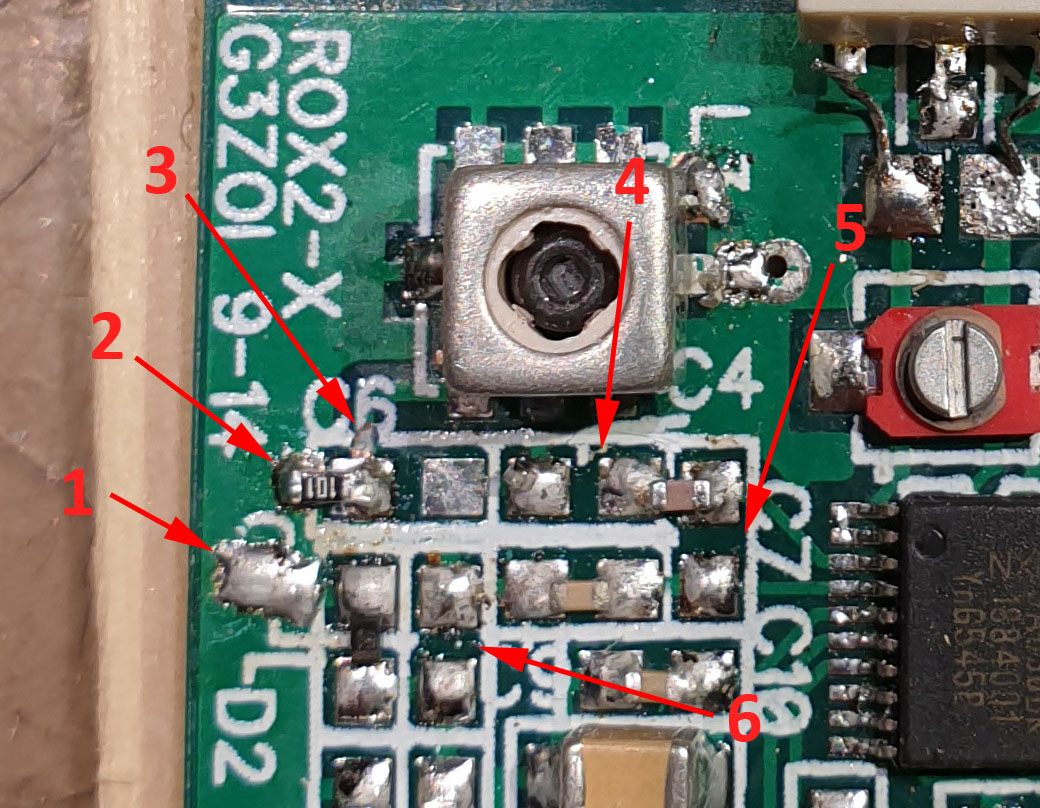
Figur 6. Modifieringar för att kunna koppla in den nya lokaloscillatorn.
I kopplingsschemorna i figurerna 2 och 4 framgår några finesser utöver vad som nämnts tidigare. Såväl RSSI-signalen som spänningen från 9-V-batteriet är indragna på analoga ingångar på processorkortet så att man kan bevaka dem från mjukvaran och presentera informationen i displayen. Batterispänningen skalas ned med en spänningsdelare för att passa området som ingångarna klarar och skyddsdioder mot 3.3 V ser till att ytterligare skydda ingångarna. En schottkydiod behövs också för att mata processorkortet från 5-V-spänningen från ROX-2X-kortet så att den matningen inte blir ihopkopplad med 5 V från USB-kabeln i de fall då man har USB inkopplad för programmering eller utläsning av information.
En aningen onödig funktion är att de två annars oanvända utgångarna från Si5351-kortet är kopplade (via dämpning i det här schemat och ännu mer dämpning i det modifierade ROX-2X-schemat i figur 2) till RF-ingången. Syftet är att kunna injicera en RF-signal med valfri frekvens så att mottagaren själv kan mäta upp karakteristiken på IF-filtret genom att svepa frekvensen på denna testsignal. Utgångarna konfigureras under testet för att drivas i motfas så att en differentiell signal skapas. Idén till den här lösningen har jag lånat från QDX-transceivern från QRP-labs [7]. Mätvärdena från RSSI-signalen, omräknade till någon sorts dB med hjälp av information i SA636-databladet, skickas ut via USB-porten till en PC där vidare analys kan göras i exempelvis Excel. Vid mätningen är det lämpligt att inte ha antennen inkopplad. Figur 7 visar inkopplingen av testsignalerna på LO-kortet medan figur 8 visar hur det ser ut där de kommer in på huvudkortet. Testsignalerna skickas i partvinnade emaljerade koppartrådar, vilket är tunnare och enklare att jobba med än koaxialkabel och fullt tillräckligt i det här fallet.
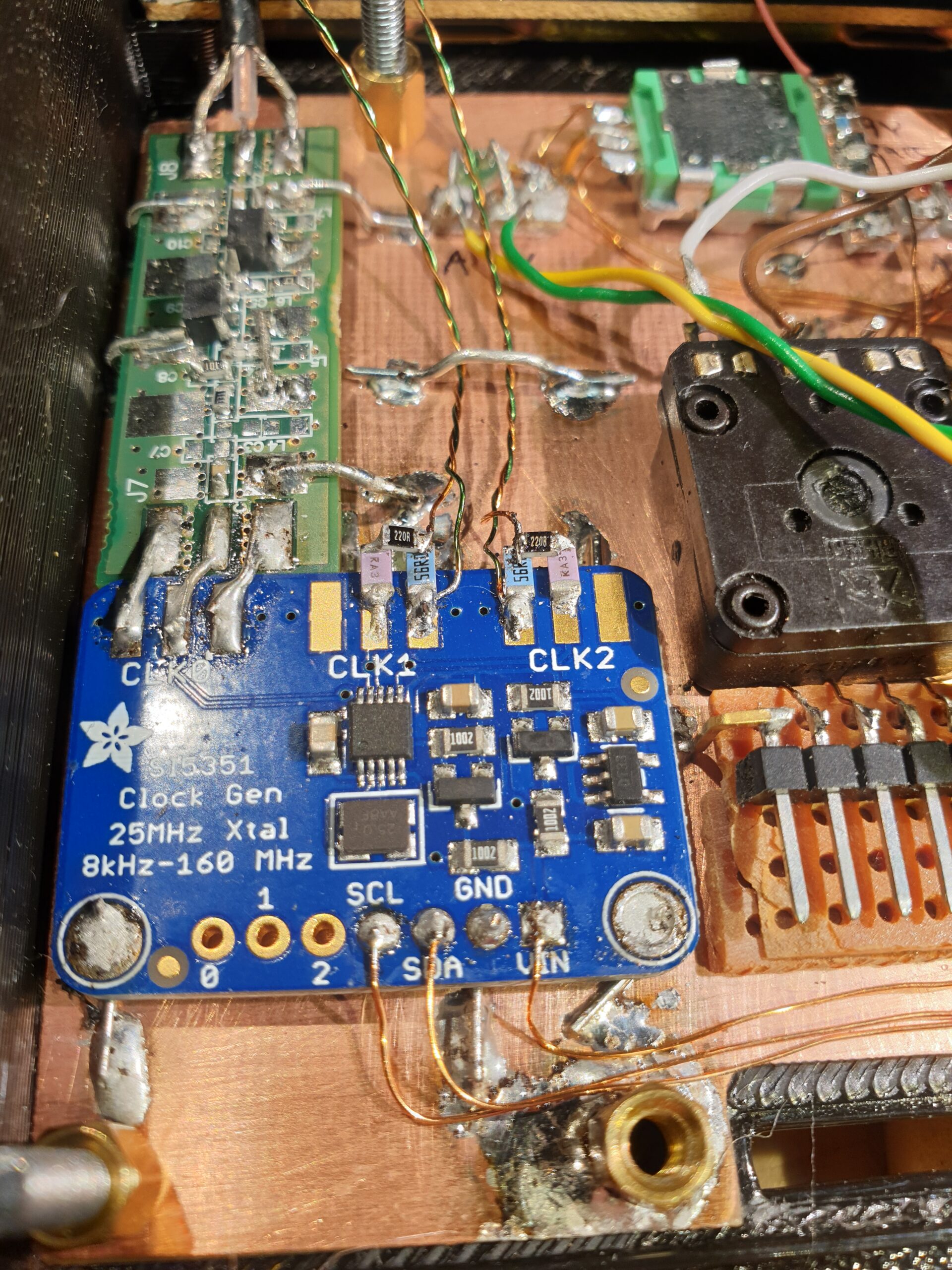
Figur 7. LO-kortet, filterkortet och inkopplingen av testsignalerna vid CLK1 och CLK2.

Figur 8. Injicering av testsignalerna på undersidan av ROX-2X-kortet. De stora seriekopplade kondensatorerna på 220 pF vardera utgör C2 som inte fick plats på ovansidan eftersom jag ville sätta transformatorn där.
Figur 9 och 10 visar resultatet från svep av såväl det önskade passbandet som spegelbandet när mottagaren var inställd på 144.75 MHz. Nivån på dämpningen utanför passbanden är inte att lita på eftersom dynamiken och brusnivån i denna test är begränsande. Inte litar jag heller fullt ut på att 1 dB skillnad på Y-axeln verkligen motsvarar 1.0 dB i verkligheten, men man får ändå en god fingervisning om hur IF-filtret beter sig.
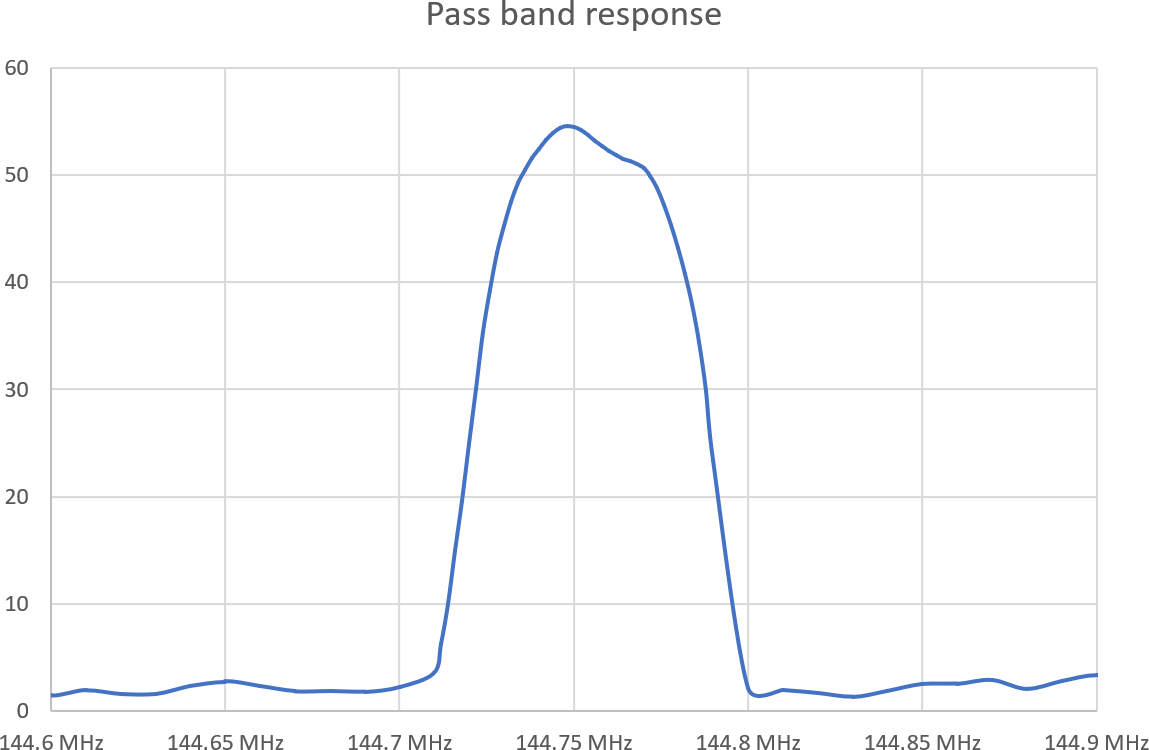
Figur 9. Responsen i det önskade passbandet. Y-axeln är graderad i någon sorts approximativ dB-enhet.
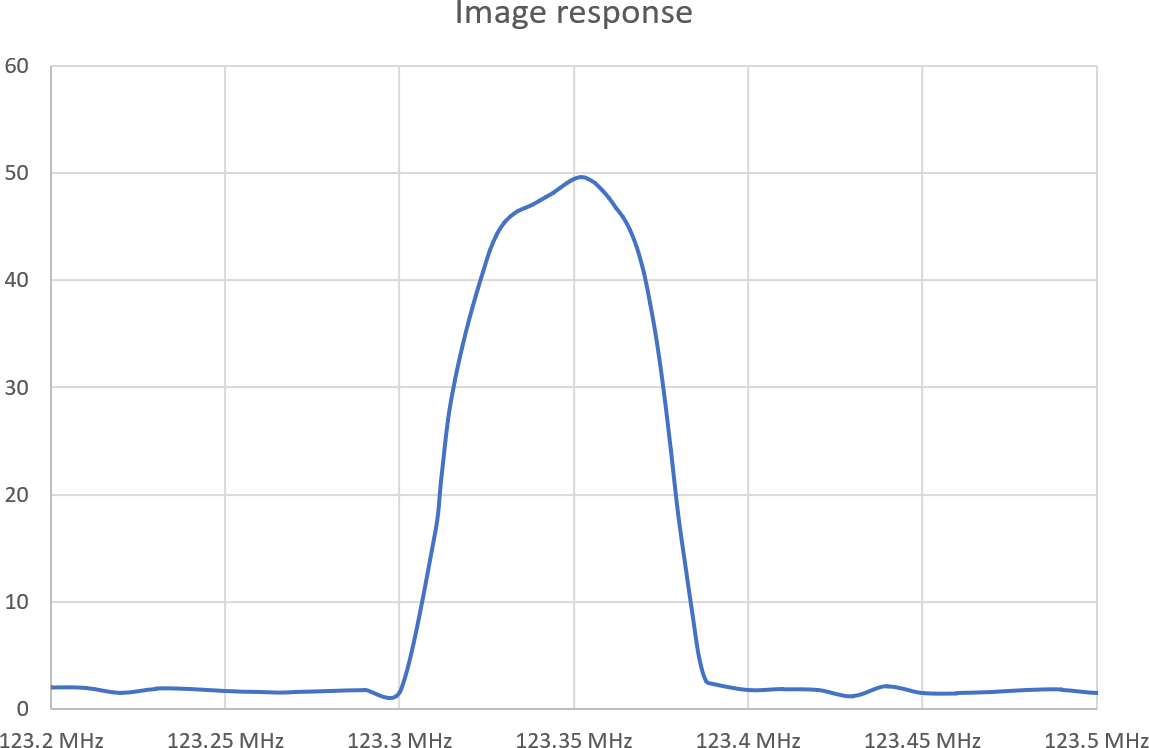
Figur 10. Responsen i spegelbandet. Y-axeln är graderad i någon sorts approximativ dB-enhet.
Notera att den lilla asymmetrin i filtret är spegelvänd mellan signalbandet och spegelbandet, precis som väntat. Bandbredden är runt 50 kHz, vilket är lite onödigt mycket för en AM-signal. En lägre bandbredd skulle ge mindre brus, men också större risk att man måste ställa om frekvensen för att få in sändare som inte ligger så exakt i frekvens. Kristallfilter skulle kunna ge lägre bandbredd, men skulle behöva lite anpassningar eftersom de normalt har betydligt högre impedans än de 330 ohm som SA636 är gjord för.
En funktion som inte kräver någon speciell hårdvara, utan bara mjukvara, är att svepa upp 2-m-bandet och leta efter störningar för att se om mottagaren stör sig själv. Det är ju alltid en risk att de digitala delarna skapar någon ton på en olycklig frekvens som dränker signalen från en svag sändare. Figur 11 visar resultatet av två sådana svep utan inkopplad antenn. Dels ett svep som gjordes i en någorlunda störningsfri miljö (ute i trädgården några meter från huset) och dels inomhus nära en del datorutrustning. Man kan se att brusmattan från datorutrustningen överröstar eventuella interna störningar, samt att det inte finns några kraftiga interna störningar på någon viss frekvens, vilket är positivt.
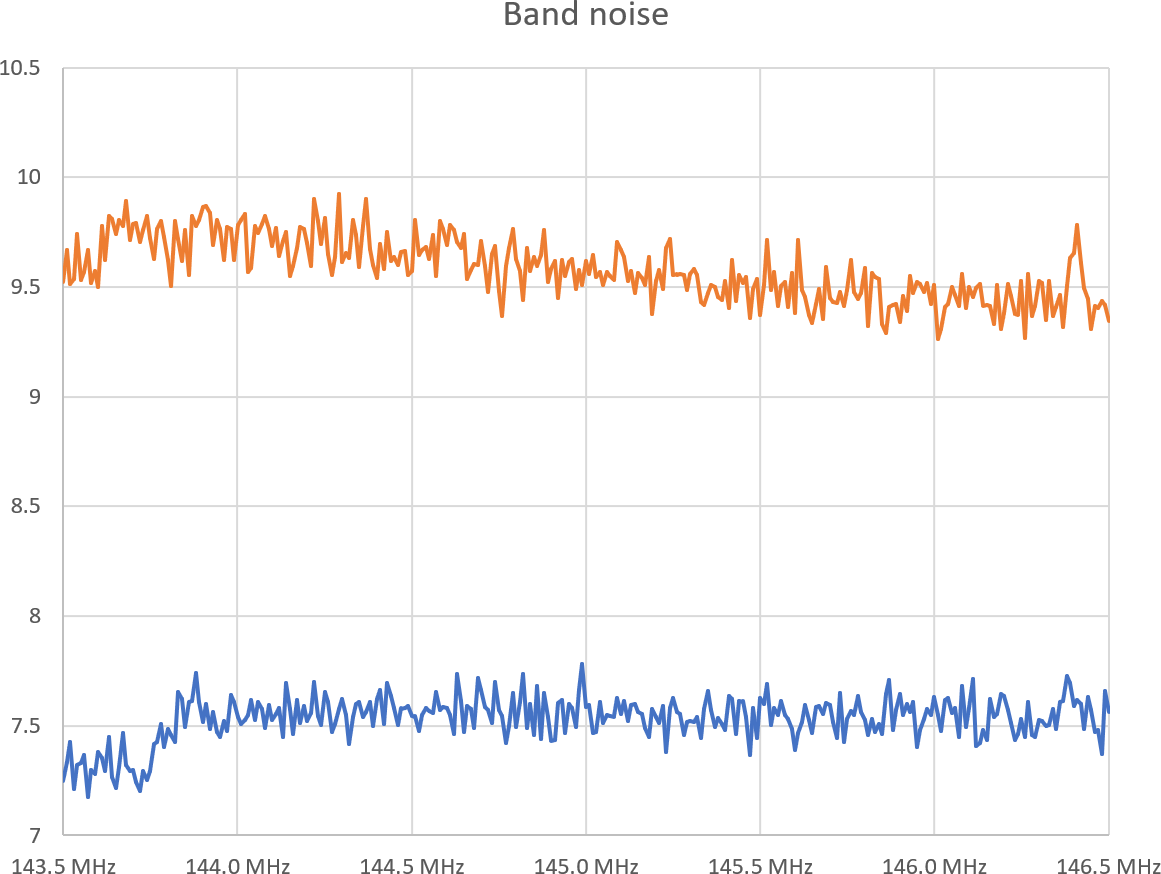
Figur 11. Uppmätt brus utan antenn. Den blå kurvan är från en relativt tyst omgivning (ute i trädgården) medan den orangea är uppmätt inomhus nära diverse datorutrustning. Y-axeln är i godtyckliga dB.
Lådan har inte någon skärmning, utöver att mycket av elektroniken och sladdarna ligger nära jordplan eller är partvinnade med jordade ledningar, så kanske skulle man kunna vinna något på mer skärmning. Å andra sidan är det antennen som är klart bäst på att plocka upp störningar och jag har inte hört någon sänkning av störnivån när jag håller inne processorns resetknapp. När man gör det fortsätter Si5351 att generera LO-signalen och de analoga delarna fortsätter fungera, men processorn upphör att köra kod och prata med displayen. Så det är en rimlig test av hur mycket självstörning som förekommer, även om man egentligen skulle behöva upprepa testet vid många frekvenser över hela bandet för att vara helt säker.
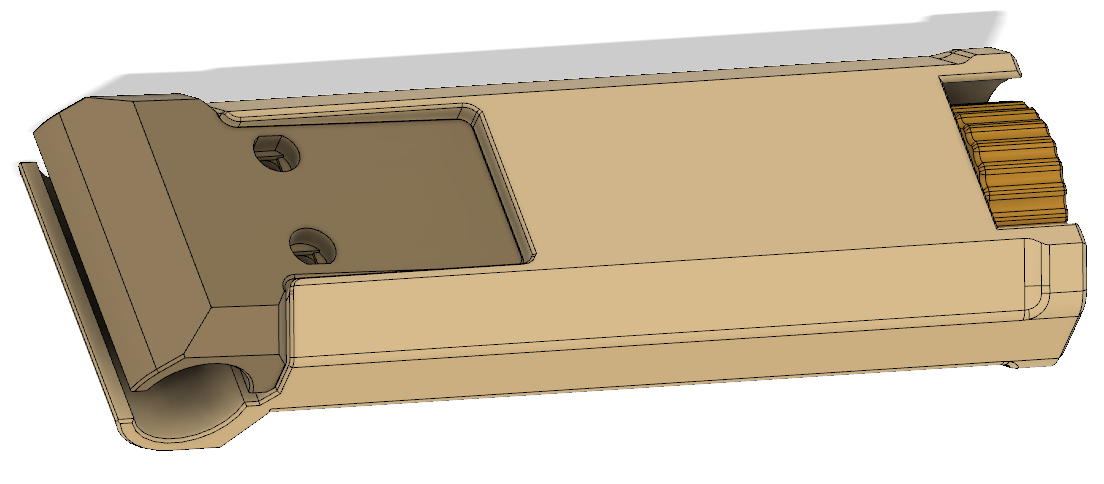
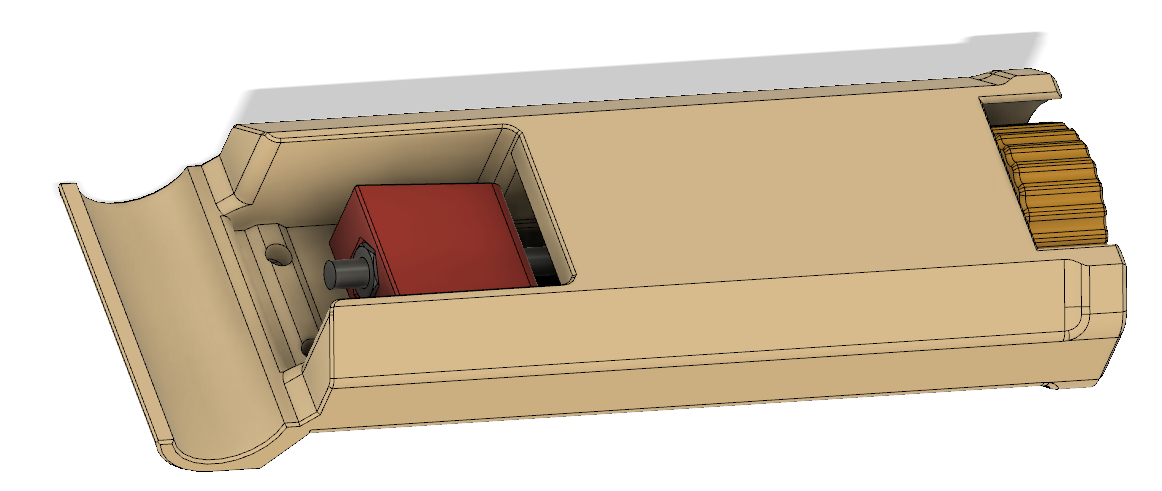
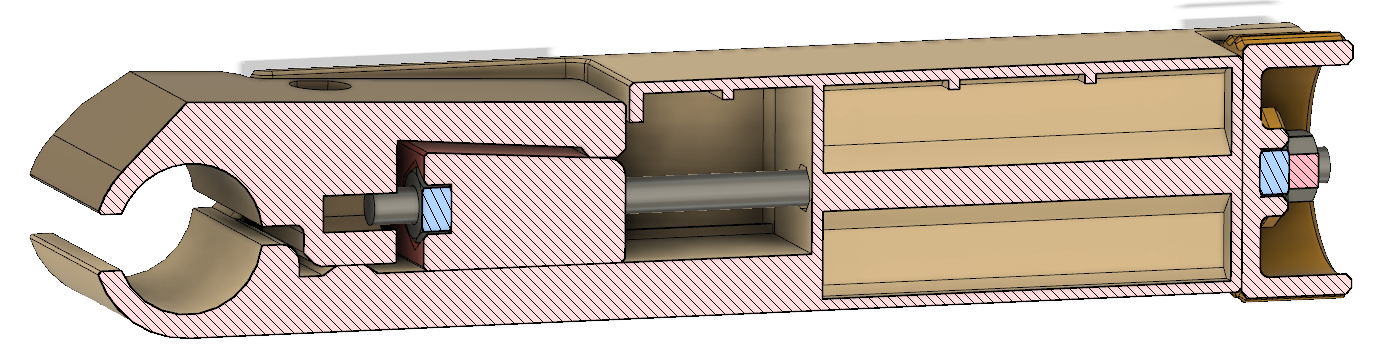
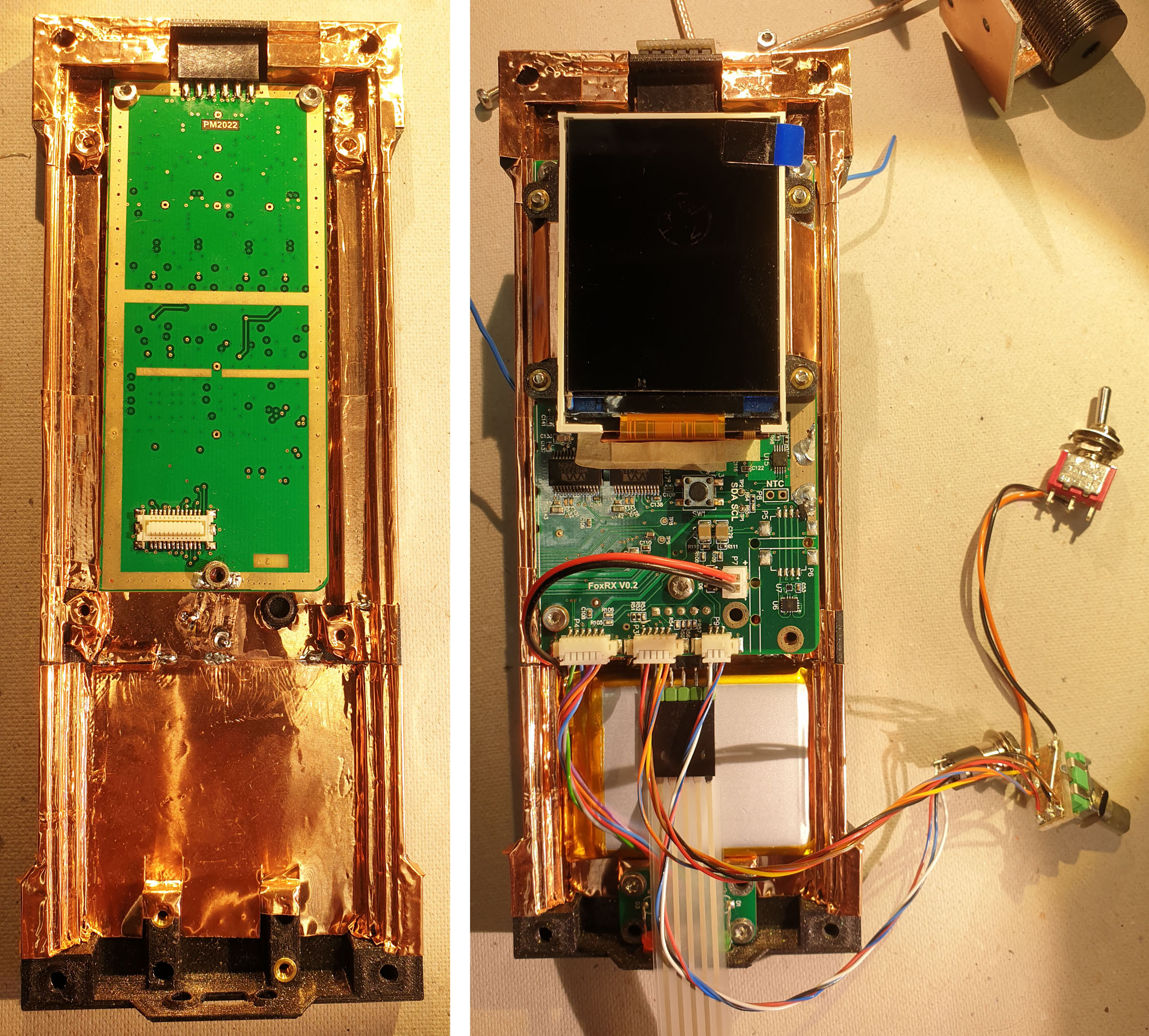
Elektroniken byggdes in i en 3D-utskriven låda med display och processorkort närmast framsidan och RF-kortet på nivån bakom. I en mellannivå på sidan om klämde jag in ett batterifack byggt av kopparlaminat. Eftersom jag var tvungen att rita upp lådan i ett CAD-program inför 3D-utskriften lade jag in även övriga detaljer där och fick på så vis bra ritningsunderlag även för hur kopparlaminaten skulle sågas till. Figur 12 visar hur det hela ser ut innan botten skruvas på. Notera att en SMA-kontakt (högst upp i bilden) används för att koppla in antennen.

Figur 12. ROX-2X-kortet sitter en nivå ovanför/bakom processor och display.
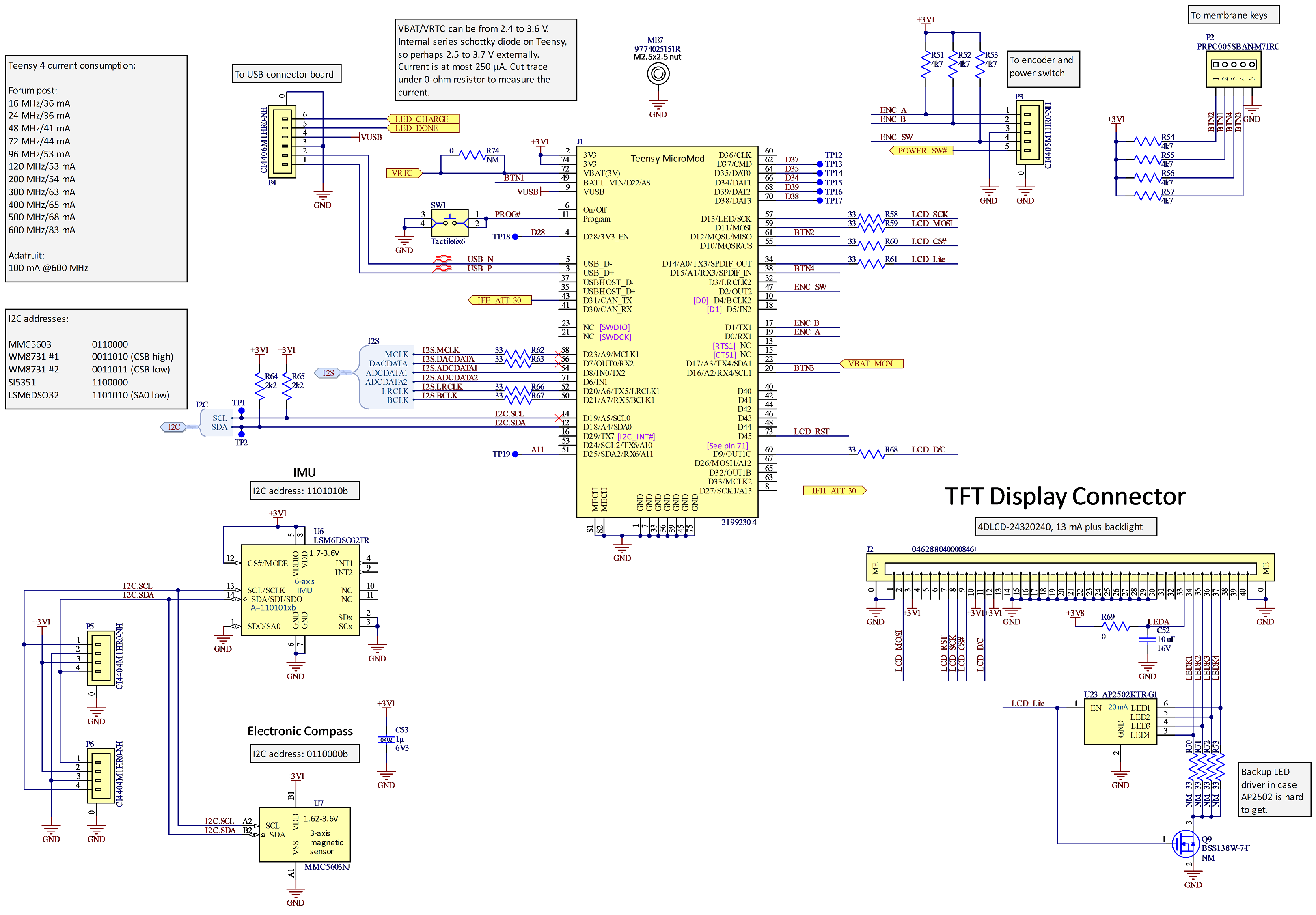
Framsidan av mottagaren visas i figur 13. Övre raden i displayen visar dels batterinivån och dels RSSI-nivån via en stapel. Genom att dynamiskt skapa specialtecken i displayen kan man få fram de tecken man för tillfället behöver för att visa en viss batterinivå eller fylla ett visst antal pixlar i den högsta rutan i stapeldiagrammet. På undre raden visas aktuell frekvens samt numret på vilken av ett antal förprogrammerade frekvenser som för tillfället är vald. Om man inte tryckt på någon knapp eller vridit på frekvensratten på 10 sekunder så slutar processorn bry sig om ratten och de flesta knapparna och man kan inte ändra något. För att låsa upp måste man trycka på ”1”. I upplåst läge kan man justera frekvens med ratten, stega mellan vilken av siffrorna i frekvensinställningen man ska justera med ”1” respektive ”2”, skifta till nästa förprogrammerade frekvens med ”3” eller gå in i ett menysystem med lite fler funktioner genom att hålla inne ”4” i minst en sekund. I menysystemet kan man bland annat förprogrammera upp till 9 olika frekvenser och starta frekvenssvepen som diskuterats ovan. Under en normal tävling behöver man förhoppningsvis varken justera frekvensen eller alls titta på displayen, så det är bara volymkontrollen och hörlurarna som kommer till användning. Möjligen kan man vilja byta till beaconfrekvensen genom att trycka på ”3” när man tagit sista räven.

Figur 13. Lådan med mottagaren.
Ett par nackdelar med att bygga ut ROX-2X på det här sättet är att vikten blir lite högre (totalt knappt 600 g inklusive antenn), samt att strömförbrukningen blir mycket högre. Jag har mätt upp strax under 50 mA och med tanke på att 9-V-batterier verkar ha en kapacitet på ca 300 mAh vid denna last så kan man med marginal köra en tävling och kanske till och med två eller möjligen tre innan det är dags att byta. Att byta till ett laddningsbart LiPo-batteri med mycket högre kapacitet och kanske lägre vikt borde inte vara alltför svårt eftersom alla kretsar förutom nuvarande displayen borde kunna fungera på 3 V. Förutom displaybyte skulle det kräva att man lägger till en laddarkrets samt möblerar om runt en del spänningsregulatorer och vid volymkontrollen. Att ha två LiPo-batterier i serie för att få högre spänning skulle kräva mindre anpassning av elektroniken, men att laddningen blir lite mer komplicerad.
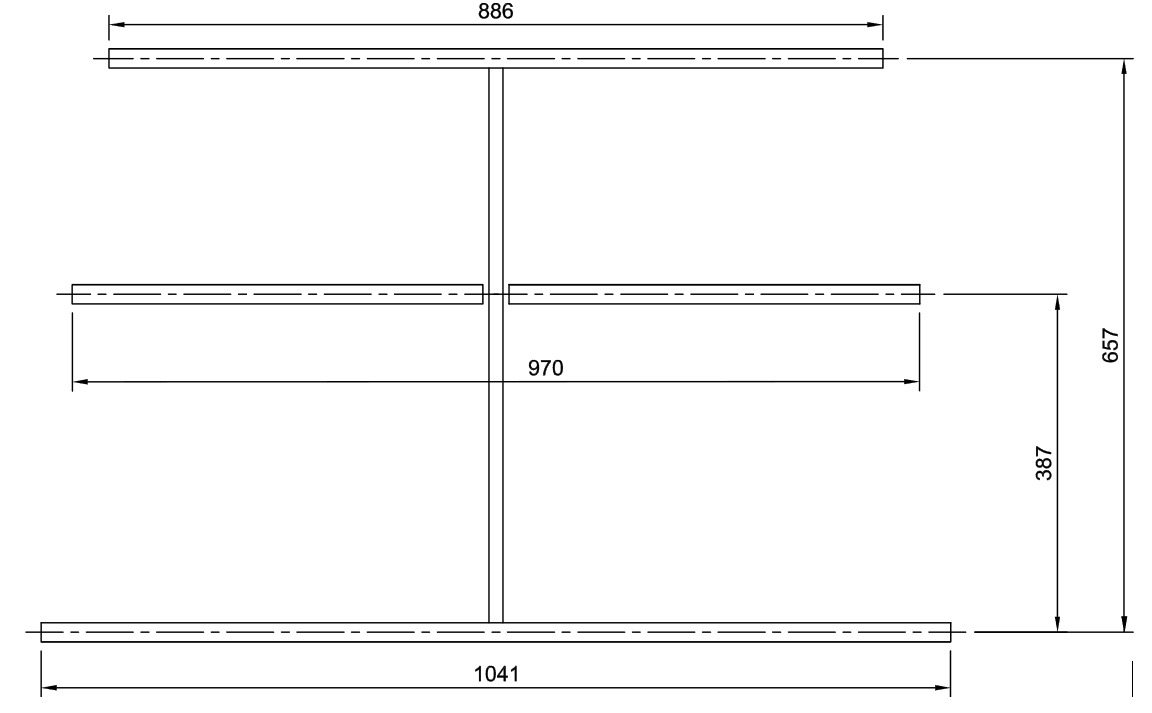
En mottagare är inte mycket att ha såvida man inte har en passande antenn. Om man letar runt lite på nätet kan man hitta flera måttritningar på olika varianter av pejlantenner för 2-m-bandet. Den vanligaste är nog en enkel Yagi med en direktor och en reflektor utöver den ”drivna” dipolen. En annan populär variant är HB9CV som har fördelen att bara ha två element och vara betydligt kortare, men nackdelarna att vara lite mer komplicerad med sina gamma-matcher och inte simuleringsbar med något program jag har tillgång till. Jag valde Yagi-spåret och efter att ha hittat flera olika förslag på mått så upptäckte jag programmet ”YagiCAD” där man kan simulera och optimera olika Yagi-konstruktioner. Efter en del optimerande från olika ursprungsdesigner fastnade jag för måtten i figur 14.
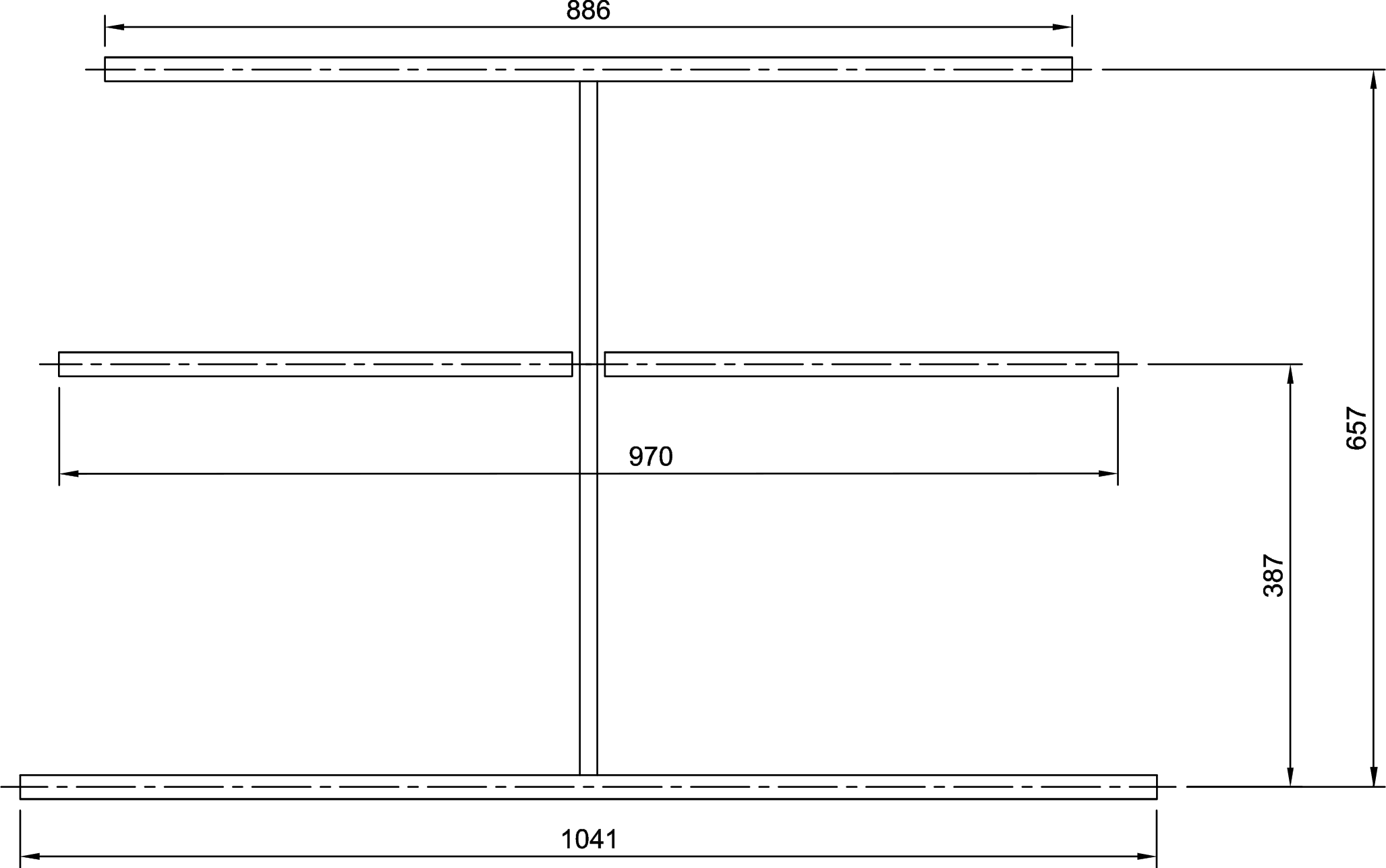
Figur 14. Måttritning för antennen. Spröten består av 25 mm brett stålmåttband; bommen av 16 mm elrör.
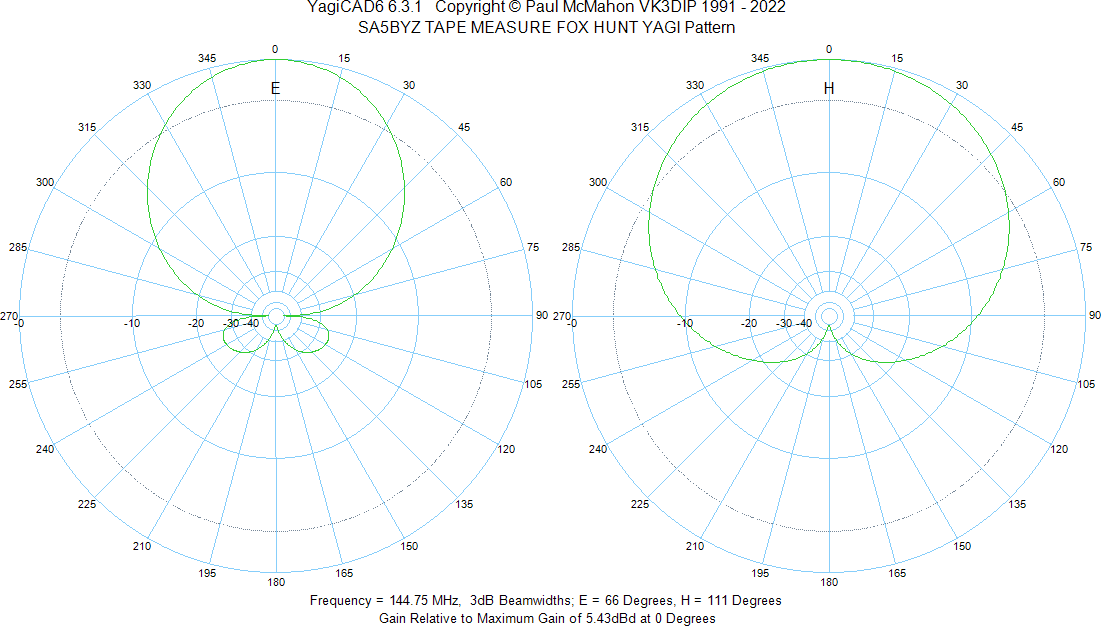
Enligt YagiCAD ska den ha strålningsdiagrammen i figur 15 vid 144.75 MHz och ett fram/bak-förhållande på över 40 dB.
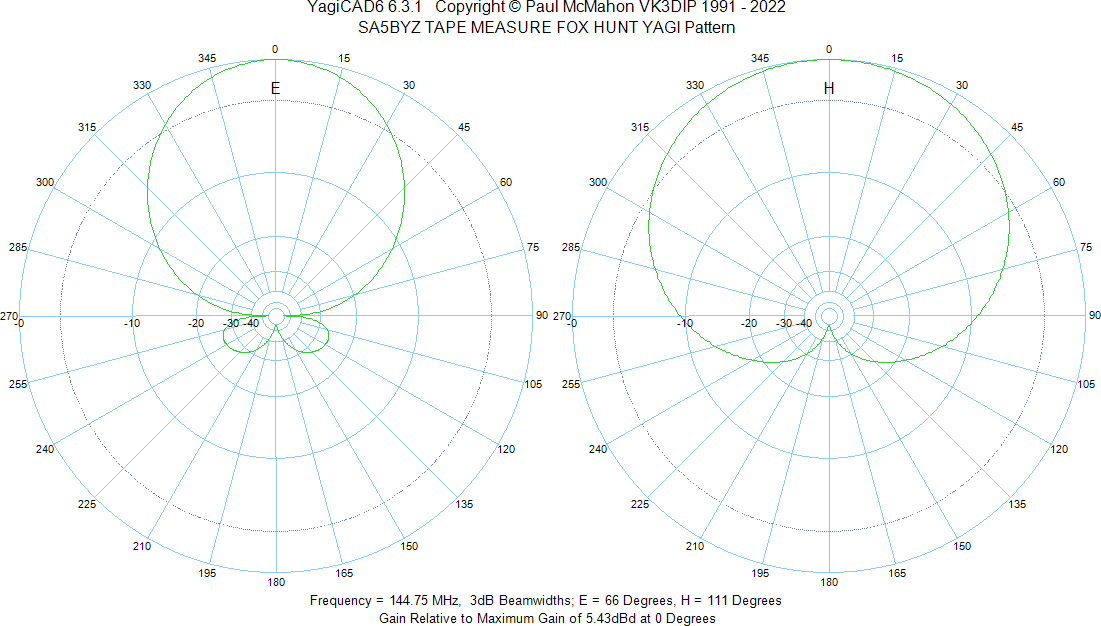
Figur 15. Simulerade strålningsdiagram för antennen.
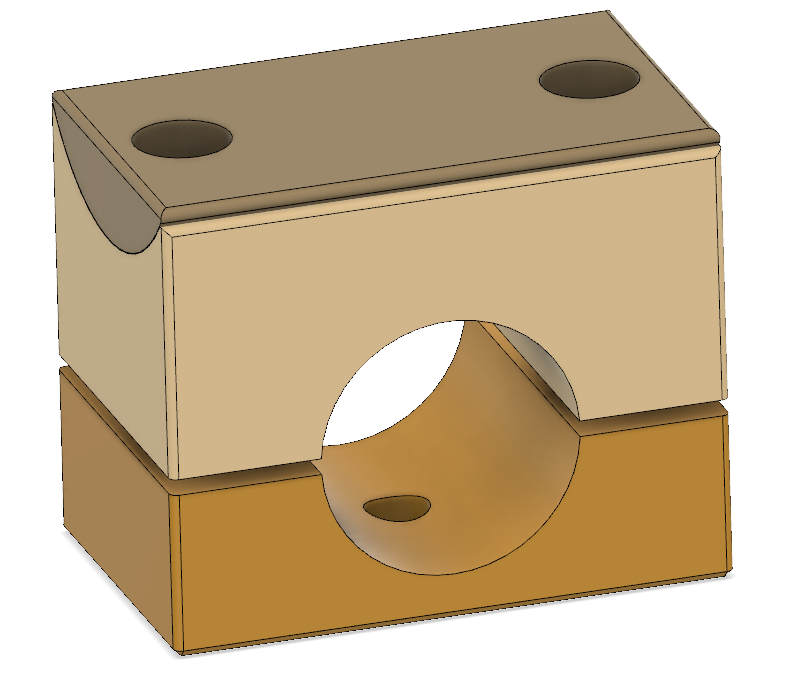
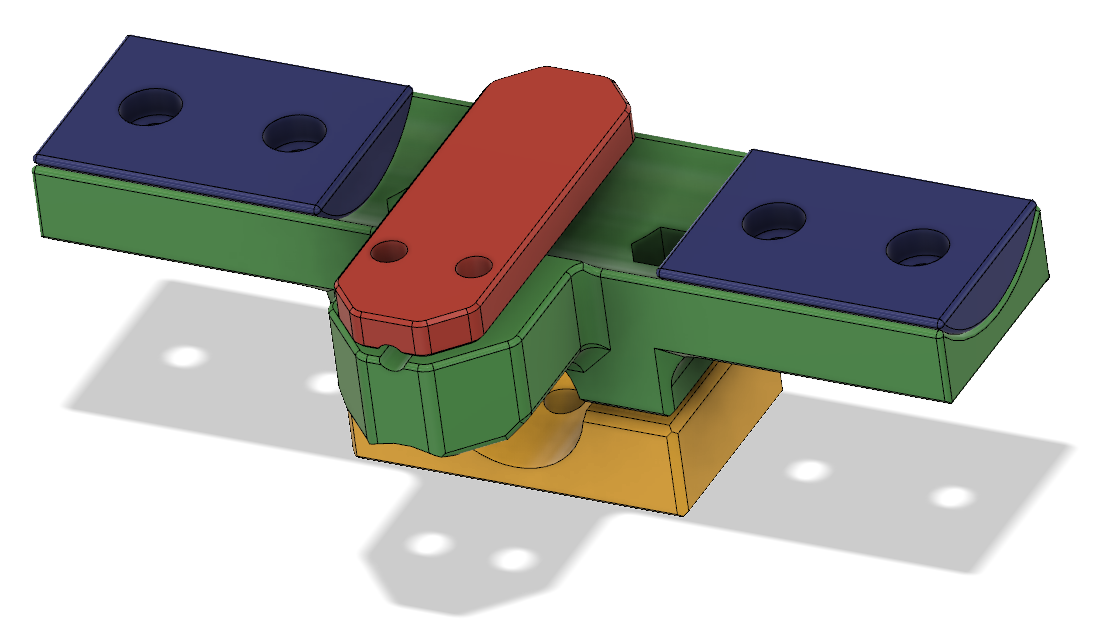
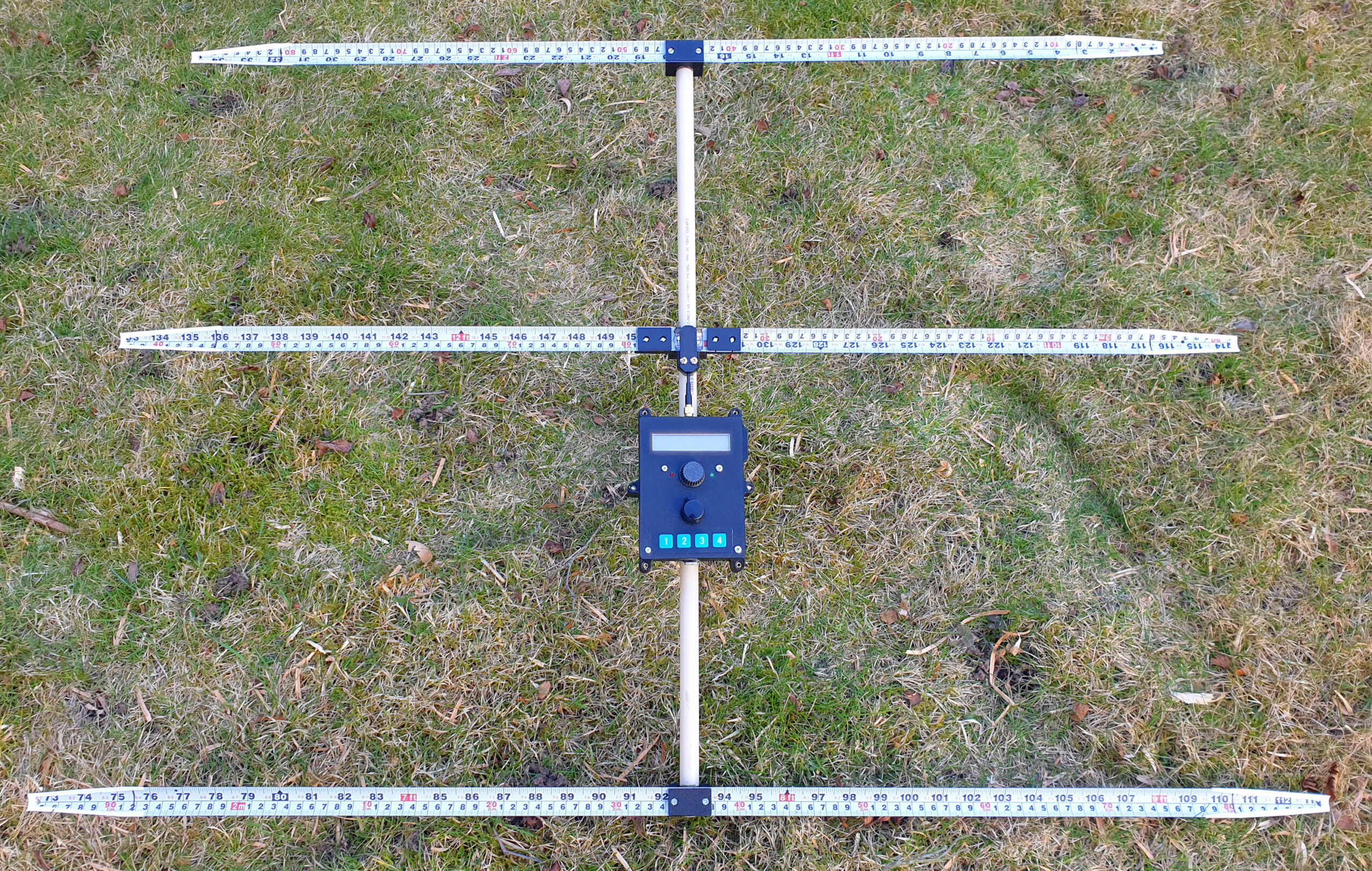
Spröten är tillverkade av 25 mm brett stålmåttband (köpt på Biltema) och som bom använde jag ett 16 mm elrör. För att fästa elementen konstruerade jag passande klämmor och skrev ut i PETG på en 3D-skrivare. Lådan för mottagaren fästs också med klämmor på bommen. För att få ett bra grepp när man håller antennen högt gjorde jag även ett handtag som fästs på bommen. Se figur 16 och 18.
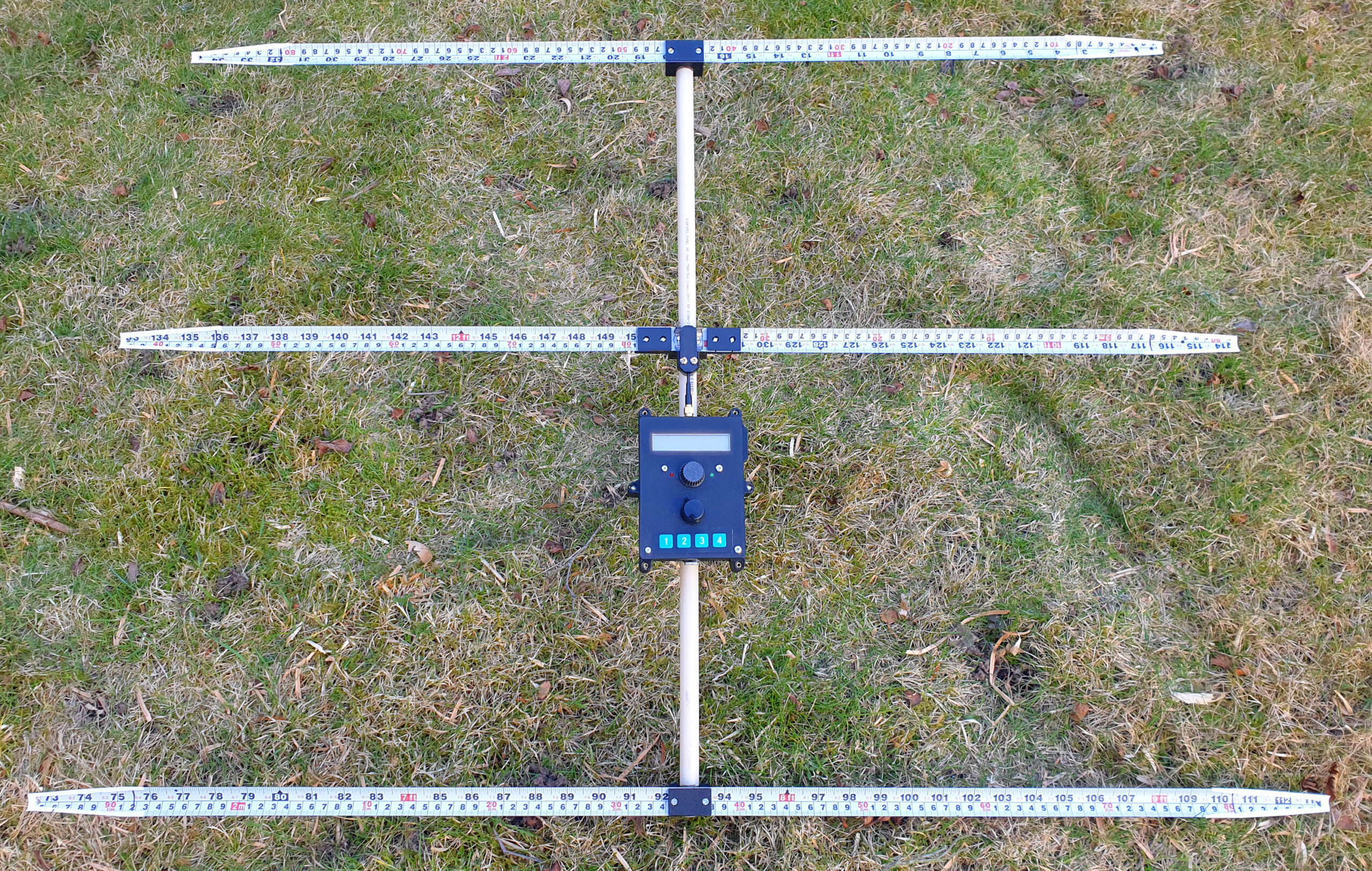
Figur 16. Komplett pejlmottagare.
Antennen är ganska otymplig när man ska transportera mottagaren, så efter lite funderande konstruerade jag 3D-utskrivbara ”papiljotter” som man kan rulla upp spröten på. För att det ska fungera spetsas ändarna på spröten något och ett hål görs nära spetsen. De vassa kanterna oskadliggörs genom att strimlor av sporttejp tejpas över dem. Spetsen sticks in i mitten av papiljotten där det finns en M2.5-skruv som kan haka fast i hålet. Sedan är det bara att rulla ihop sprötet och avsluta med att sätta över en klämma som håller det hela på plats. Handtaget går också att vika åt sidan för att bli mindre skrymmande. Se figur 17 och 18.

Figur 17. Spetsat spröt med hål samt närbild på papiljotter.
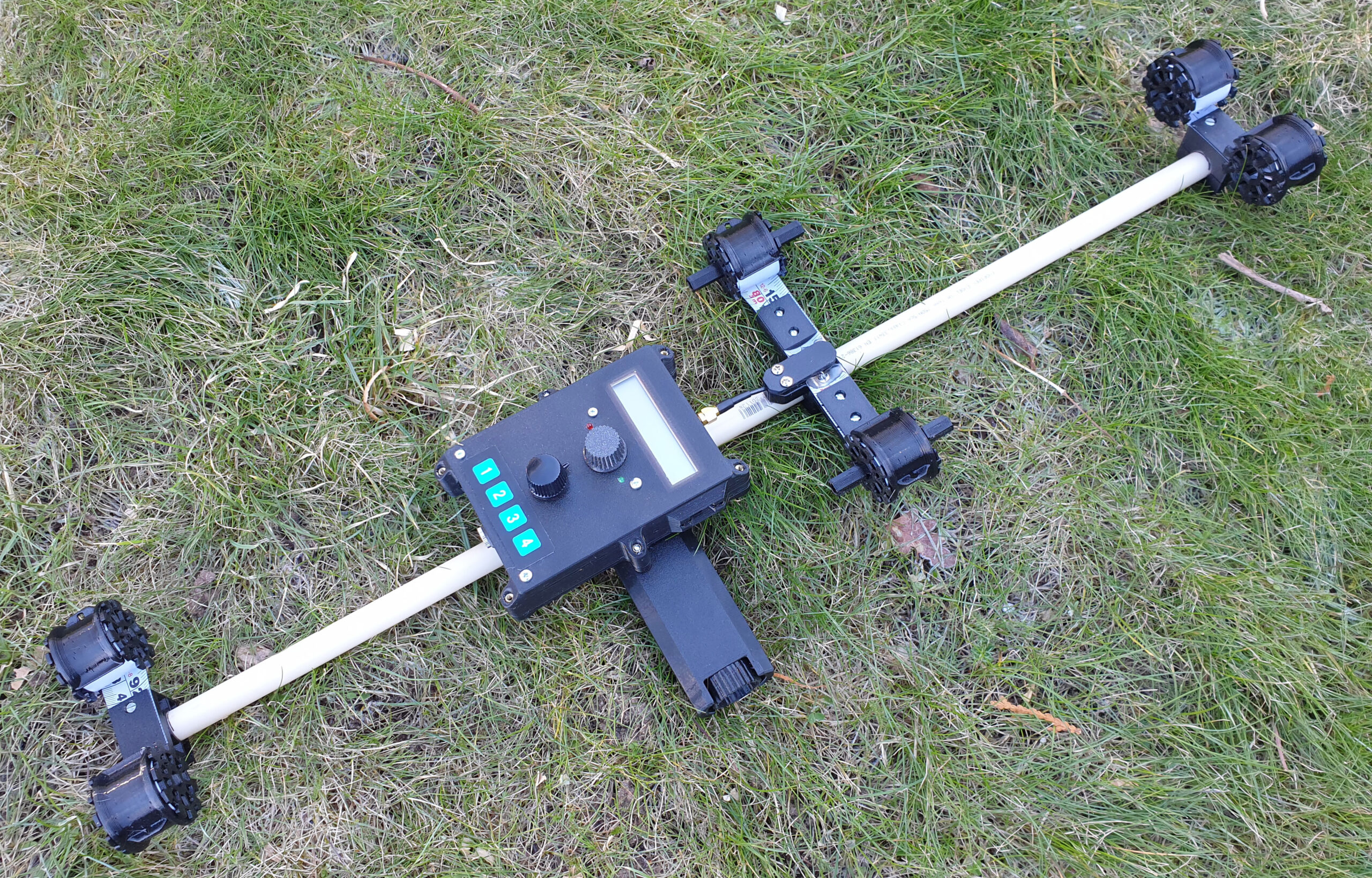
Figur 18. Mottagaren hopfälld och klar för transport.
Modeller för de olika 3D-utskrivna delarna till antennen går att ladda ned från [8].
Enligt YagiCAD ska impedansen på antennen vara 33 – j5 Ω vid 145 MHz. Jag mätte upp den med en nätverksanalysator (VNWA) och fick den till 35 + j0 Ω (såklart lite beroende på antennens omgivning; i vissa positioner blev det nästan exakt 50 Ω). Eftersom jag mätte i änden på ca 6 cm koax (ca 0,2 ns) som vrider impedansen en aning medsols i Smith-diagrammet så är resultatet ännu närmare det teoretiska. Nästan lite för bra för att vara sant.
Jag mätte även inimpedansen i mottagaren och med hjälp av C3 kunde jag trimma den till 38 + j13 Ω. Av en lycklig slump (?) matchar alltså den resistiva delen nästan perfekt, medan det skulle behövas lite kapacitiv reaktans i serie med mottagarens ingång. -j13 Ω motsvaras vid 145 MHz av 84 pF. Jag hade 47 pF i lager och satte två sådana parallellt i serie med SMA-kontakten på ingången och hamnade på 32 – j0 Ω vid nästa mätning. Efter dessa övningar borde matchningen mellan antenn och mottagare vara utmärkt. Att den differentiella signalen från antennen skickas en kort bit i en koax utan föregående balun har förhoppningsvis inte alltför stor negativ inverkan.
Ännu har mottagaren inte testats i någon tävling, men preliminära tester jag gjort ser lovande ut. Jag satte i vardagsrummet, nära ett fönster, upp en enkel dipol som drivs av en signalgenerator som moduleras med lämpliga morse-signaler. Vid -10 dBm (0.1 mW) från generatorn så hörs sändaren tydligt på 500 m avstånd med nästan fri sikt. Inom 150 m hoppar audio-S-metern igång om man har volymen tillräckligt uppskruvad. Riktverkan och fram/back-förhållande upplever jag som goda. Som vanligt på 2-m-bandet så går det att hitta platser där signalen är betydligt svagare eller kommer från ett oväntat håll, men i den ganska snälla testmiljön blir det till allra största delen rättvisande bäringar och om mottagningen är konstig räcker det oftast att flytta sig en meter eller två. Jämfört med en annan, lånad, mottagare baserad på ROX-2X så upplever jag min som något mindre brusig (trots den digitala elektroniken) och lite mer känslig. Den bättre känsligheten tror jag beror på en mer omsorgsfull anpassning mellan antenn och mottagare och möjligen också på skillnader i antennkonstruktionen. Den stora skillnaden i användarupplevelse var dock att man slipper ratta på frekvensen för att hitta signalen.
Jag satte även upp en riktig 2-m-räv (gissningsvis 0,5 – 1 W) 500 m och 500 kHz från min svaga testsändare för att testa fallet att man befinner sig nära mål-beacon och vill pejla mot någon avlägsen räv. Med både min och den lånade mottagaren var jag tvungen att ta mig drygt 100 m från räven för att kunna pejla på ett meningsfullt sätt mot den svaga signalen. Det verkar alltså som att SA636 har rätt risiga blocker-prestanda och störs ut av en stark signal, även om den ligger 500 kHz från den frekvens som är inställd. Kanske en anledning att framöver konstruera en ny rävsax som baserar sig på en annan RF-kedja?