It is that time of year when one puts electric advent stars and candlesticks in the windows. I usually use timers to control them, but this year I ran into a problem. Some of my timers were of the type “EverFlourish EMT757A”, probably bought at Clas Ohlson:
Back side of timer
Despite having a notoriously bad user interface (that forces me to google the user manual each time I want to use them), the timers, that had been laying in a drawer since last season, showed an entirely blank LCD display, even when connected to a mains outlet. I guessed that an internal battery just need to be charged, so I left them connected for a day to allow them to be charged up. The display however remained blank.
Hmm. I had encountered similar timers before that needed the internal battery to be replaced, so I decided to have a look inside to determine if this was the case again. It turned out that the screws used to keep the units together had tamper proof tri-wing heads. Fortunately, I happened to have bits that fit this kind of head, so this did not deter me.
Tamper proof tri-wing screw headTri-wing bit
I found that there was indeed a tiny chargeable NiMH battery inside the unit (the green component with white corrosion on the side, close to the center of the picture below). Despite the unwanted corrosion, I found that the battery was actually charged to 1.3 V or thereabout, which is fine for a NiMH battery. Maybe it did not need to be replaced after all?
Opened mains timer
But why then was the display dead?
I put the timer back together again and had another look at the front. Pressing any of the normal buttons did not result in any reaction, but there was also a tiny little recessed button marked RESET. I used a pen to press it and voilà! The display came to life!
The timer has been brought back to life.
Stupid me to not try this before I disassembled the unit.
I suppose the reason the timer behaves like this is that the processor controlling the display probably does not have a proper power on reset circuit. So when the supply voltage is ramped very slowly, as it is when it is powered from a battery that is trickle charged from a state of being completely dead, the processor does not jump into action properly, even after the supply voltage reaches its proper level.
I regularly listen to a number of podcasts and below is a list, along with some comments, of the electronics related ones.
I find that the podcasts provide inspiration, insight and knowledge about tools, projects, parts, companies, people and resources in the world of electronics. I first learned about many of the building blocks, components and development tools I use in my hobby projects through these podcasts.
I guess this is the longest running electronics related podcast I know of, started in 2010. “An off-the-cuff podcast about electronics designs, and anything electronic industry related.” Chris Gammell and Dave Jones (of the EEVblog) chat weekly either with each other or guests about industry news, hacker/maker/open hardware stuff or other things mostly related to electronics. Chris works for Parts IO and teaches the online course Contextual Electronics while Dave is an opinionated and quite successful youtuber. If I need to pick a favorite electronics podcast, this is it.
Started in 2013 this is another weekly show, but slightly more geared towards embedded software than electronics, although some of the guests are more into electronics. Elecia and Christopher White discuss between themselves or with guests about “the how, why, and what of engineering, usually devices.” The guests include “makers, entrepreneurs, educators, and normal, traditional engineers.” Both Elecia and Christopher are embedded software consultants in Silicon Valley. Well worth a listen if you are into electronics or embedded software.
“A podcast discussing the nuts and bolts of embedded electronics, the systems that use them, and the community that surrounds them.” Started in 2014 and hosted by Karl and Corey. Episodes often have a specific theme and occasionally features guests. This podcast recently came back from a five month hiatus and hopefully new episodes will continue to appear reasonably regularly.
MacroFab describes themselves as “The World’s First Self-Service Cloud Manufacturing Platform” and seem to specialize in small volume PCBA manufacturing. The weekly podcast was started in 2016 and is hosted by Parker Dillmann and Stephen Kraig who are engineers at the company. They mostly talk enthusiastically about projects they are working on (they seem to do a lot of fun projects, often with unclear connection to the business) and discuss industry news. The program can be quite inspirational and does not feel like an ad for MacroFab.
A little warning might be in place. Of the podcasts listed here, I get the impression that this is the one on which the hosts are most likely to sound relatively sure about something that is utterly wrong.
SolderSmoke is mostly about home-brew HAM radio. Hosts Bill Meara, M0HBR, and Pete Juliano, N6QW, discuss their radio projects and issues they run into. This is the show for anyone who is interested in home-brew radio or perhaps HAM radio in general.
This bi-weekly podcast is only occasionally about electronics and more often about other aspects of engineering and being – or becoming – an engineer. It was co-founded in 2012 by Chris Gammell of The Amp Hour, but he left the program a few years ago. Today the show is hosted by the other co-founder Jeff Shelton (a mechanical engineer) as well as Adam (civil engineer), Brian (electrical engineer) and Carmen (also an electrical engineer).
This podcast was started by Mentor Graphics in 2015 and was hosted by John McMillan for 10 episodes before it abruptly ended for unknown reasons. It contained some useful information and insights for PCB layout designers, but also tended to push Mentor’s tools and brand. It distinctly felt like it was produced by a company as opposed to the other podcasts on this list which are run by more or less independent enthusiasts.
In recent years, I have been using Arduinos and Teensys with the Arduino environment and FRDM boards using the mbed web-based environment for small processor-controlled projects. However, when doing a project with a custom PCB that includes the processor, these platforms and environments are no longer quite as attractive.
Sure, one can use the same processor as exists on some Arduino and program it with the proper Arduino bootloader and continue working in the Arduino environment. Or one could use e.g. an STM32 processor that exists on one of the boards supported by mbed and program it via the ST-link of such a board. But when moving away from exactly the processor variants that exist on mbed-supported boards, one might run into trouble as ordinary users do not seem to be able to configure the mbed environment for other processor variants. Also, the fact that mbed resides in the cloud could be downside depending on personal preferences.
For these reasons I wanted to set up a local development environment so that I could use some reasonably modern 32-bit ARM processor on a fully custom board. I also wanted a solution that did not cost any money, so Keil and IAR are out of the question. I opted to use STM32L052C8T6 from the the STM32 L0 family of low-power Cortex M0+ parts as it seemed to have the features and performance I needed while also being power efficient and thereby possibly supporting battery operation at some future version of my design. An advantage of STM32-processors from ST is that they can be programmed via the ST-Link that is built into every inexpensive (~$10-15) Discovery or Nucleo development board. So no expensive programmer is necessary.
There seems to be more than one option for free development environments for STM32 processors and I first tried to set up Eclipse with the GNU ARM Eclipse plugins. After a lot of time reading various posts on the GNU ARM Eclipse website and installing all the bits and pieces I still was not able to compile the configuration and initialization code generated by STM32CubeMX. Probably someone with more experience, patience and knowledge of Eclipse than me could get this to work, but after a lot of fiddling around with settings of include and code directories I tried another option, namely the SW4STM32 environment provided by the company Ac6.
Tool installation
SW4STM32 is a free (but requires registration) tool based on Eclipse. Although I use it on Windows, it is also available for Linux and MacOSX. I guess most of the below instructions apply for non-Windows installations as well.
This is how to install SW4STM32:
Create an account on http://www.openstm32.org/HomePage and log in.
Follow the instructions under Documentation > System Workbench for STM32 > Installation manual, or continue below.
If you get a warning about JavaRE, you need to install the appropriate Java runtime from Oracle. It has to have the same architecture (32/64-bit) as SW4STM32.
Click through the dialogs. Select C:\Ac6\SystemWorkbench or some other suitable path without spaces in the folder names as installation directory.
Launch the program when the installation is finished and go to Help > Check for updates to update to the latest version of all the components.
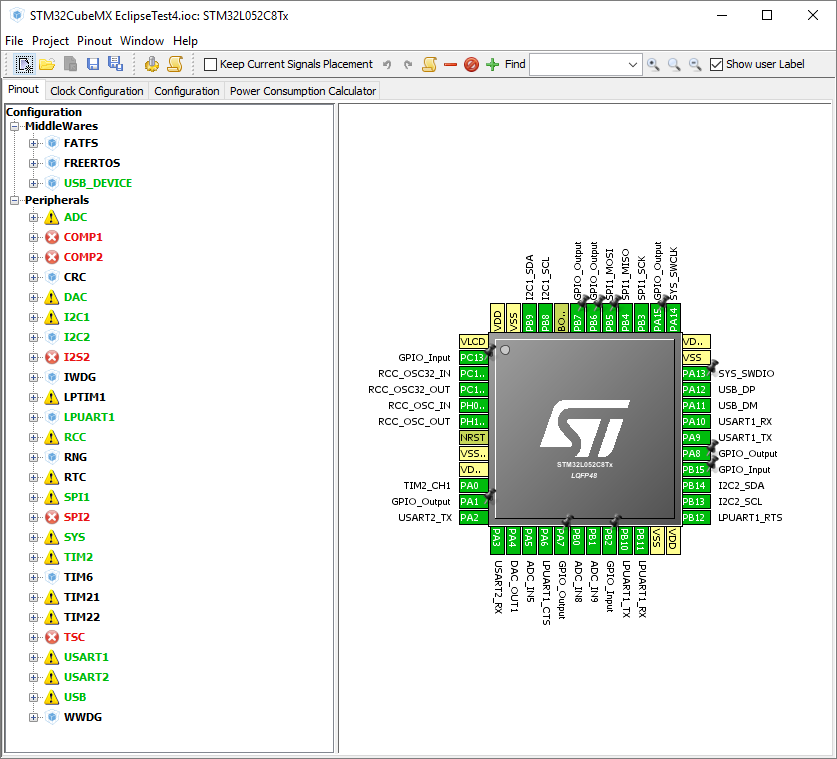
To get started with the software development, one can use the tool STM32CubeMX from ST to generate configuration and initialization code:
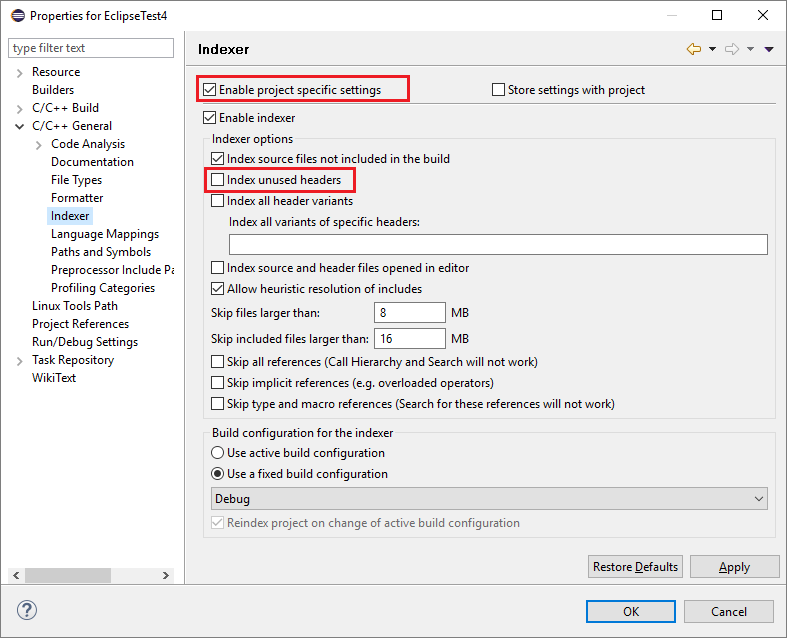
The trick is to tell SW4STM32 to not parse files that are not used by the project. This is how to do that:
Select Project > Properties > C/C++ General > Indexer
Check “Enable project specific settings”
Uncheck “Index unused headers”.
After this fix the code compiled without errors!
Getting to blinky
To quickly test that I could get all the way to code executing on the processor I added a simple LED-blinking routine inside the infinite while loop in the CubeMX code (I had LEDs on PA15 and PA7):
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_15, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_7, GPIO_PIN_RESET);
HAL_Delay(200);
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_15, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_7, GPIO_PIN_SET);
HAL_Delay(200);
}
/* USER CODE END 3 */
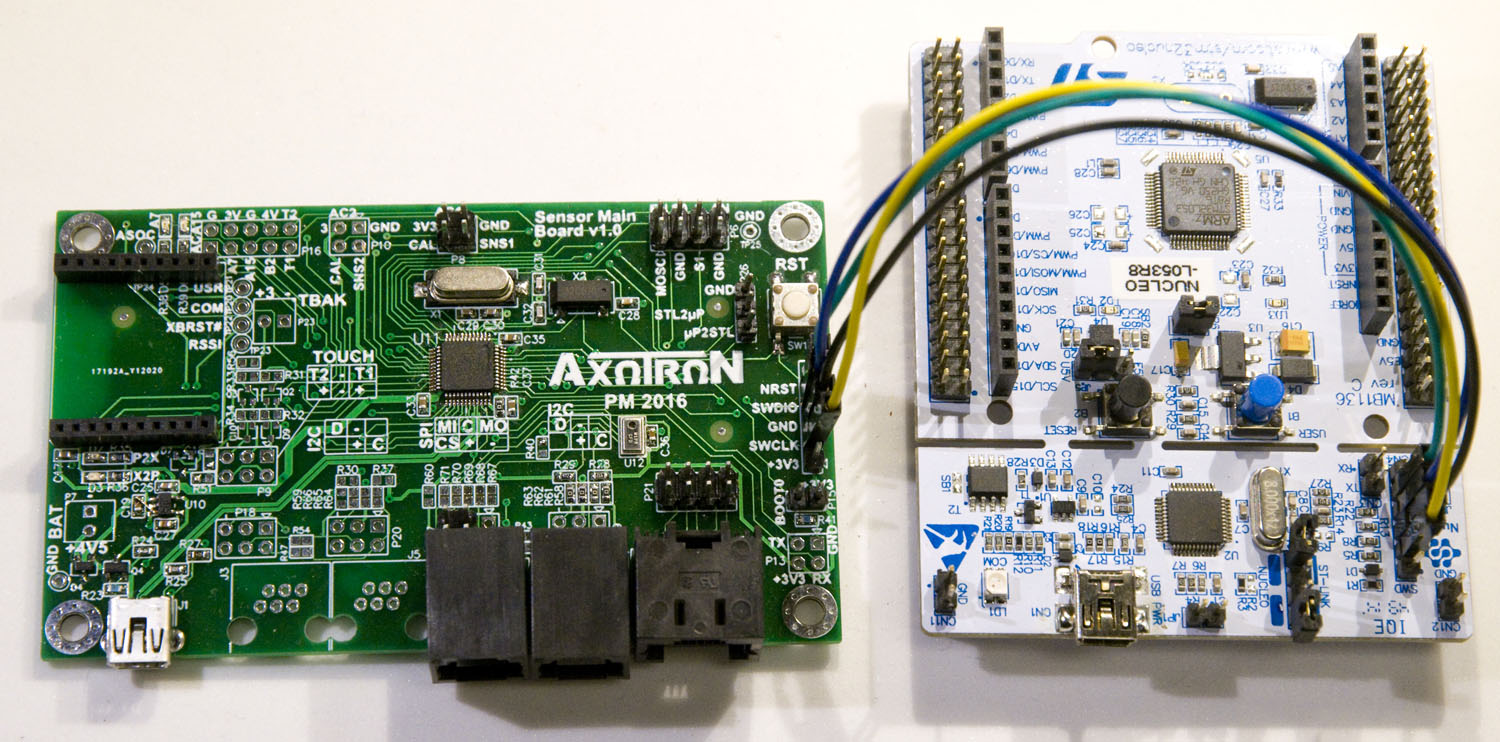
“Project > Build All” generated a .bin file in the Debug catalog under the project folder. I configured my ST-Link for talking to an external board and connected it to my target board.
ST-Link of a Nucleo board connected to the target board.
Then I connected both boards via USB cables to the computer and dragged the .bin file to the “NODE_L053R8” drive that the ST-Link appears as. The programming worked and the LEDs started blinking!